Produkte
-

Raspberry Pi Foundation Raspberry Pi Pico 2 H
Der Raspberry Pi Pico 2 H (mit Header) ist ein neues Mikrocontroller-Board der Raspberry Pi Foundation, basierend auf dem RP2350. Es verfügt über eine höhere Kerntaktrate, doppelt so viel On-Chip-SRAM, doppelt so viel On-Board-Flash-Speicher, leistungsstärkere Arm-Kerne, optionale RISC-V-Kerne, neue Sicherheitsfunktionen und verbesserte Schnittstellenfunktionen. Der Raspberry Pi Pico 2 H bietet eine deutliche Steigerung der Leistung und Funktionen und behält gleichzeitig die Hardware- und Softwarekompatibilität mit früheren Mitgliedern der Raspberry Pi Pico-Serie bei. Der RP2350 bietet eine umfassende Sicherheitsarchitektur rund um Arm TrustZone für Cortex-M. Es umfasst signiertes Booten, 8 KB Antifuse-OTP für die Schlüsselspeicherung, SHA-256-Beschleunigung, einen Hardware-TRNG und schnelle Glitch-Detektoren. Die einzigartige Dual-Core- und Dual-Architektur-Fähigkeit des RP2350 ermöglicht Benutzern die Wahl zwischen einem Paar ARM Cortex-M33-Kernen nach Industriestandard und einem Paar Hazard3 RISC-V-Kernen mit offener Hardware. Der Raspberry Pi Pico 2 ist in C/C++ und Python programmierbar und wird durch eine ausführliche Dokumentation unterstützt. Er ist das ideale Mikrocontroller-Board sowohl für Enthusiasten als auch für professionelle Entwickler. Technische Daten CPU Dual Arm Cortex-M33 oder Dual RISC-V Hazard3 Prozessoren bei 150 MHz Speicher 520 KB On-Chip-SRAM; 4 MB integrierter QSPI-Flash Schnittstellen 26 Mehrzweck-GPIO-Pins, darunter 4, die für AD verwendet werden können Peripheriegeräte 2x UART 2x SPI-Controller 2x I²C-Controller 24x PWM-Kanäle 1x USB 1.1-Controller und PHY, mit Host- und Geräteunterstützung 12x PIO-Zustandsmaschinen Eingangsspannung 1,8-5,5 V DC Abmessungen 21 x 51 mm Downloads Datasheet (Pico 2) Datasheet (RP2350)
-

Raspberry Pi Foundation Raspberry Pi Pico 2 WH
Der Raspberry Pi Pico 2 WH (mit Header) ist ein Mikrocontroller-Board auf Basis des RP2350 mit 2,4 GHz 802.11n Wireless LAN und Bluetooth 5.2. Es gibt Ihnen noch mehr Flexibilität bei Ihren IoT- oder Smart-Produktdesigns und erweitert die Möglichkeiten für Ihre Projekte. Der RP2350 bietet eine umfassende Sicherheitsarchitektur rund um Arm TrustZone für Cortex-M. Es umfasst signiertes Booten, 8 KB Antifuse-OTP für die Schlüsselspeicherung, SHA-256-Beschleunigung, einen Hardware-TRNG und schnelle Glitch-Detektoren. Die einzigartige Dual-Core- und Dual-Architektur-Fähigkeit des RP2350 ermöglicht Benutzern die Wahl zwischen einem Paar ARM Cortex-M33-Kernen nach Industriestandard und einem Paar Hazard3 RISC-V-Kernen mit offener Hardware. Der Raspberry Pi Pico 2 WH ist in C/C++ und Python programmierbar und wird durch eine ausführliche Dokumentation unterstützt. Er ist das ideale Mikrocontroller-Board sowohl für Enthusiasten als auch für professionelle Entwickler. Technische Daten CPU Dual Arm Cortex-M33 oder Dual RISC-V Hazard3 Prozessoren bei 150 MHz Wireless On-Board Infineon CYW43439 Single-Band 2,4 GHz 802.11n Wireless Lan und Bluetooth 5.2 Speicher 520 KB On-Chip-SRAM; 4 MB integrierter QSPI-Flash Schnittstellen 26 Mehrzweck-GPIO-Pins, darunter 4, die für AD verwendet werden können Peripherie 2x UART 2x SPI-Controller 2x I²C-Controller 24x PWM-Kanäle 1x USB 1.1-Controller und PHY, mit Host- und Geräteunterstützung 12x PIO-Zustandsmaschinen Eingangsspannung 1,8-5,5 V DC Abmessungen 21 x 51 mm Downloads Datasheet Pinout Schematic
-

Elektor Publishing Raspberry Pi Pico Essentials
Program, build, and master over 50 projects with MicroPython and the RP2040 microprocessor The Raspberry Pi Pico is a high-performance microcontroller module designed especially for physical computing. Microcontrollers differ from single-board computers, like the Raspberry Pi 4, in not having an operating system. The Raspberry Pi Pico can be programmed to run a single task very efficiently within real-time control and monitoring applications requiring speed. The ‘Pico’ as we call it, is based on the fast, efficient, and low-cost dual-core ARM Cortex-M0+ RP2040 microcontroller chip running at up to 133 MHz and sporting 264 KB of SRAM, and 2 MB of Flash memory. Besides its large memory, the Pico has even more attractive features including a vast number of GPIO pins, and popular interface modules like ADC, SPI, I²C, UART, and PWM. To cap it all, the chip offers fast and accurate timing modules, a hardware debug interface, and an internal temperature sensor. The Raspberry Pi Pico is easily programmed using popular high-level languages such as MicroPython and or C/C++. This book is an introduction to using the Raspberry Pi Pico microcontroller in conjunction with the MicroPython programming language. The Thonny development environment (IDE) is used in all the projects described. There are over 50 working and tested projects in the book, covering the following topics: Installing the MicroPython on Raspberry Pi Pico using a Raspberry Pi or a PC Timer interrupts and external interrupts Analogue-to-digital converter (ADC) projects Using the internal temperature sensor and external temperature sensor chips Datalogging projects PWM, UART, I²C, and SPI projects Using Wi-Fi and apps to communicate with smartphones Using Bluetooth and apps to communicate with smartphones Digital-to-analogue converter (DAC) projects All projects given in the book have been fully tested and are working. Only basic programming and electronics experience is required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full MicroPython program listings are given for all projects described. Readers can find the program listings on the Elektor web page created to support the book.
€ 39,95
Mitglieder: € 35,96
-

Elektor Digital Raspberry Pi Pico Essentials (E-book)
Program, build, and master over 50 projects with MicroPython and the RP2040 microprocessor The Raspberry Pi Pico is a high-performance microcontroller module designed especially for physical computing. Microcontrollers differ from single-board computers, like the Raspberry Pi 4, in not having an operating system. The Raspberry Pi Pico can be programmed to run a single task very efficiently within real-time control and monitoring applications requiring speed. The ‘Pico’ as we call it, is based on the fast, efficient, and low-cost dual-core ARM Cortex-M0+ RP2040 microcontroller chip running at up to 133 MHz and sporting 264 KB of SRAM, and 2 MB of Flash memory. Besides its large memory, the Pico has even more attractive features including a vast number of GPIO pins, and popular interface modules like ADC, SPI, I²C, UART, and PWM. To cap it all, the chip offers fast and accurate timing modules, a hardware debug interface, and an internal temperature sensor. The Raspberry Pi Pico is easily programmed using popular high-level languages such as MicroPython and or C/C++. This book is an introduction to using the Raspberry Pi Pico microcontroller in conjunction with the MicroPython programming language. The Thonny development environment (IDE) is used in all the projects described. There are over 50 working and tested projects in the book, covering the following topics: Installing the MicroPython on Raspberry Pi Pico using a Raspberry Pi or a PC Timer interrupts and external interrupts Analogue-to-digital converter (ADC) projects Using the internal temperature sensor and external temperature sensor chips Datalogging projects PWM, UART, I²C, and SPI projects Using Wi-Fi and apps to communicate with smartphones Using Bluetooth and apps to communicate with smartphones Digital-to-analogue converter (DAC) projects All projects given in the book have been fully tested and are working. Only basic programming and electronics experience is required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full MicroPython program listings are given for all projects described. Readers can find the program listings on the Elektor web page created to support the book.
€ 32,95
Mitglieder: € 29,66
-
Elektor Digital Raspberry Pi Pico for Radio Amateurs (E-book)
Program and build RPi Pico-based ham station utilities, tools, and instruments Although much classical HF and mobile equipment is still in use by large numbers of amateurs, the use of computers and digital techniques has now become very popular among amateur radio operators. Nowadays, anyone can purchase a €5 Raspberry Pi Pico microcontroller board and develop many amateur radio projects using the “Pico” and some external components. This book is aimed at amateur radio enthusiasts, Electronic Engineering students, and anyone interested in learning to use the Raspberry Pi Pico to shape their electronic projects. The book is suitable for beginners in electronics as well as for those with wide experience. Step-by-step installation of the MicroPython programming environment is described. Some knowledge of the Python programming language is helpful to be able to comprehend and modify the projects given in the book. The book introduces the Raspberry Pi Pico and gives examples of many general-purpose, software-only projects that familiarize the reader with the Python programming language. In addition to the software-only projects tailored to the amateur radio operator, Chapter 6 in particular presents over 36 hardware-based projects for “hams”, including: Station mains power on/off control Radio station clock GPS based station geographical coordinates Radio station temperature and humidity Various waveform generation methods using software and hardware (DDS) Frequency counter Voltmeter / ammeter / ohmmeter / capacitance meter RF meter and RF attenuators Morse code exercisers RadioStation Click board Raspberry Pi Pico based FM radio Using Bluetooth and Wi-Fi with Raspberry Pi Pico Radio station security with RFID Audio amplifier module with rotary encoder volume control Morse decoder Using the FS1000A TX-RX modules to communicate with Arduino
€ 32,95
Mitglieder: € 29,66
-

Raspberry Pi Foundation Raspberry Pi Pico H
Raspberry Pi Pico ist ein günstiges, leistungsstarkes Mikrocontroller-Board und gleichzeitig das erste Produkt, das auf dem von Raspberry Pi selbst entwickelten Chip basiert. Der RP2040-Mikrocontroller-Chip ("Raspberry Silicon") verfügt über einen Dual-Core-ARM-Cortex-M0+ Prozessor, der mit 133 MHz getaktet ist, 256 KB RAM, 30 GPIO-Pins und viele weitere Schnittstellenoptionen. Dazu kommen 2 MB on-board QSPI-Flashspeicher für Code- und Datenspeicherung. Technische Daten RP2040-Mikrocontroller-Chip, entwickelt von Raspberry Pi in Großbritannien Dual-Core ARM Cortex M0+ Prozessor mit flexiblem Takt von bis zu 133 MHz 264 kB SRAM und 2 MB on-board Flash-Speicher Gegossenes Modul ermöglicht direktes Löten auf Trägerplatinen USB 1.1 Host- und Device-Unterstützung Stromsparende Sleep- und Dormant-Modi Drag-and-Drop-Programmierung mit Massenspeicher über USB 26x multifunktions-GPIO-Pins 2x SPI, 2x I²C, 2x UART, 3x 12-bit ADC, 16x steuerbare PWM-Kanäle Genaue Uhr und Timer auf dem Chip Temperatursensor Beschleunigte Fließkomma-Bibliotheken auf dem Chip 8x programmierbare IO (PIO) Zustandsautomaten für eigene Peripherie H-Version des Raspberry Pi Pico mit bereits angelöteten Pinheadern und 3-Pin Debug-Anschluss Downloads Specifications of 3-pin Debig Connector
-

Raspberry Pi Foundation Raspberry Pi Pico W
Raspberry Pi Pico W ist ein Mikrocontroller-Board, das auf dem Mikrocontroller-Chip Raspberry Pi RP2040 basiert. Der Mikrocontroller-Chip RP2040 ("Raspberry Silicon") bietet einen Dual-Core-ARM-Cortex-M0+-Prozessor (133 MHz), 256 KB RAM, 30 GPIO-Pins und viele andere Schnittstellenoptionen. Darüber hinaus gibt es 2 MB integrierten QSPI-Flash-Speicher für Code- und Datenspeicherung. Raspberry Pi Pico W wurde als kostengünstige und dennoch flexible Plattform für RP2040 mit einer drahtlosen 2,4-GHz-Schnittstelle unter Verwendung eines Infineon CYW43439 entwickelt. Die Funkschnittstelle wird über SPI mit dem RP2040 verbunden. Features von Pico W RP2040-Mikrocontroller mit 2 MB Flash-Speicher Integrierte 2,4-GHz-Single-Band-Wireless-Schnittstellen (802.11n) Micro-USB-B-Anschluss für Strom und Daten (und zur Neuprogrammierung des Flash) 40-polige 21 x 51 mm 'DIP'-Stil, 1 mm dicke PCB mit 0,1" Durchgangslochstiften, auch mit Randkerben Bietet 26 multifunktionale 3,3-V-Universal-I/O (GPIO) 23 GPIO sind rein digital, wobei drei auch ADC-fähig sind Kann als Modul auf der Oberfläche montiert werden 3-poliger ARM Serial Wire Debug (SWD) Port Einfache, aber hochflexible Stromversorgungsarchitektur Verschiedene Optionen zur einfachen Stromversorgung des Geräts über Micro-USB, externe Netzteile oder Batterien Hohe Qualität, niedrige Kosten, hohe Verfügbarkeit Umfassendes SDK, Softwarebeispiele und Dokumentation Features von RP2040-Mikrocontroller Dual-Core-Cortex M0+ mit bis zu 133 MHz On-Chip-PLL ermöglicht eine variable Kernfrequenz 264 kByte Multibank-Hochleistungs-SRAM Externer Quad-SPI-Flash mit eXecute In Place (XIP) und 16 KB On-Chip-Cache Hochleistungs-Full-Crossbar-Busgewebe On-Board USB1.1 (Gerät oder Host) 30 Multifunktions-Allzweck-I/O (vier können für ADC verwendet werden) 1,8-3,3 V I/O-Spannung 12-Bit 500 ksps Analog-Digital-Wandler (ADC) Verschiedene digitale Peripheriegeräte 2x UART, 2x I²C, 2x SPI, 16x PWM-Kanäle 1 Timer mit 4 Alarmen, 1 Echtzeituhr 2x programmierbare I/O-Blöcke (PIO), insgesamt 8 Zustandsmaschinen Flexible, benutzerprogrammierbare Hochgeschwindigkeits-I/O Kann Schnittstellen wie SD-Karte und VGA emulieren Hinweis: Raspberry Pi Pico W I/O-Spannung ist auf 3,3 V festgelegt. Downloads Datasheet Specifications of 3-pin Debug Connector
-
Elektor Publishing Raspberry Pi Pico W (Book)
Program, build, and master 60+ projects with the Wireless RP2040 The Raspberry Pi Pico and Pico W are based on the fast, efficient, and low-cost dual-core ARM Cortex M0+ RP2040 microcontroller chip running at up to 133 MHz and sporting 264 KB of SRAM and 2 MB of Flash memory. Besides spacious memory, the Pico and Pico W offer many GPIO pins, and popular peripheral interface modules like ADC, SPI, I²C, UART, PWM, timing modules, a hardware debug interface, and an internal temperature sensor. The Raspberry Pi Pico W additionally includes an on-board Infineon CYW43439 Bluetooth and Wi-Fi chipset. At the time of writing this book, the Bluetooth firmware was not yet available. Wi-Fi is however fully supported at 2.4 GHz using the 802.11b/g/n protocols. This book is an introduction to using the Raspberry Pi Pico W in conjunction with the MicroPython programming language. The Thonny development environment (IDE) is used in all of the 60+ working and tested projects covering the following topics: Installing the MicroPython on Raspberry Pi Pico using a Raspberry Pi or a PC Timer interrupts and external interrupts Analogue-to-digital converter (ADC) projects Using the internal temperature sensor and external sensor chips Using the internal temperature sensor and external temperature sensor chips Datalogging projects PWM, UART, I²C, and SPI projects Using Bluetooth, WiFi, and apps to communicate with smartphones Digital-to-analogue converter (DAC) projects All projects are tried & tested. They can be implemented on both the Raspberry Pi Pico and Raspberry Pi Pico W, although the Wi-Fi-based subjects will run on the Pico W only. Basic programming and electronics experience are required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full MicroPython program listings are given for all projects.
€ 44,95
Bestpreis
-
Elektor Digital Raspberry Pi Pico W (E-book)
Program, build, and master 60+ projects with the Wireless RP2040 The Raspberry Pi Pico and Pico W are based on the fast, efficient, and low-cost dual-core ARM Cortex M0+ RP2040 microcontroller chip running at up to 133 MHz and sporting 264 KB of SRAM and 2 MB of Flash memory. Besides spacious memory, the Pico and Pico W offer many GPIO pins, and popular peripheral interface modules like ADC, SPI, I²C, UART, PWM, timing modules, a hardware debug interface, and an internal temperature sensor. The Raspberry Pi Pico W additionally includes an on-board Infineon CYW43439 Bluetooth and Wi-Fi chipset. At the time of writing this book, the Bluetooth firmware was not yet available. Wi-Fi is however fully supported at 2.4 GHz using the 802.11b/g/n protocols. This book is an introduction to using the Raspberry Pi Pico W in conjunction with the MicroPython programming language. The Thonny development environment (IDE) is used in all of the 60+ working and tested projects covering the following topics: Installing the MicroPython on Raspberry Pi Pico using a Raspberry Pi or a PC Timer interrupts and external interrupts Analogue-to-digital converter (ADC) projects Using the internal temperature sensor and external sensor chips Using the internal temperature sensor and external temperature sensor chips Datalogging projects PWM, UART, I²C, and SPI projects Using Bluetooth, WiFi, and apps to communicate with smartphones Digital-to-analogue converter (DAC) projects All projects are tried & tested. They can be implemented on both the Raspberry Pi Pico and Raspberry Pi Pico W, although the Wi-Fi-based subjects will run on the Pico W only. Basic programming and electronics experience are required to follow the projects. Brief descriptions, block diagrams, detailed circuit diagrams, and full MicroPython program listings are given for all projects.
€ 34,95
Mitglieder: € 31,46
-
Raspberry Pi Foundation Raspberry Pi Pico WH
Raspberry Pi Pico W ist ein Mikrocontroller-Board, das auf dem Mikrocontroller-Chip Raspberry Pi RP2040 basiert. Der Mikrocontroller-Chip RP2040 ("Raspberry Silicon") bietet einen Dual-Core-ARM-Cortex-M0+-Prozessor (133 MHz), 256 KB RAM, 30 GPIO-Pins und viele andere Schnittstellenoptionen. Darüber hinaus gibt es 2 MB integrierten QSPI-Flash-Speicher für Code- und Datenspeicherung. Raspberry Pi Pico W wurde als kostengünstige und dennoch flexible Plattform für RP2040 mit einer drahtlosen 2,4-GHz-Schnittstelle unter Verwendung eines Infineon CYW43439 entwickelt. Die Funkschnittstelle wird über SPI mit dem RP2040 verbunden. Features von Pico WH RP2040-Mikrocontroller mit 2 MB Flash-Speicher Integrierte 2,4-GHz-Single-Band-Wireless-Schnittstellen (802.11n) Micro-USB-B-Anschluss für Strom und Daten (und zur Neuprogrammierung des Flash) 40-polige 21 x 51 mm 'DIP'-Stil, 1 mm dicke PCB mit 0,1" Durchgangslochstiften, auch mit Randkerben Bietet 26 multifunktionale 3,3-V-Universal-I/O (GPIO) 23 GPIO sind rein digital, wobei drei auch ADC-fähig sind Kann als Modul auf der Oberfläche montiert werden 3-poliger ARM Serial Wire Debug (SWD) Port Einfache, aber hochflexible Stromversorgungsarchitektur Verschiedene Optionen zur einfachen Stromversorgung des Geräts über Micro-USB, externe Netzteile oder Batterien Hohe Qualität, niedrige Kosten, hohe Verfügbarkeit Umfassendes SDK, Softwarebeispiele und Dokumentation Features von RP2040-Mikrocontroller Dual-Core-Cortex M0+ mit bis zu 133 MHz On-Chip-PLL ermöglicht eine variable Kernfrequenz 264 kByte Multibank-Hochleistungs-SRAM Externer Quad-SPI-Flash mit eXecute In Place (XIP) und 16 KB On-Chip-Cache Hochleistungs-Full-Crossbar-Busgewebe On-Board USB1.1 (Gerät oder Host) 30 Multifunktions-Allzweck-I/O (vier können für ADC verwendet werden) 1,8-3,3 V I/O-Spannung 12-Bit 500 ksps Analog-Digital-Wandler (ADC) Verschiedene digitale Peripheriegeräte 2x UART, 2x I²C, 2x SPI, 16x PWM-Kanäle 1 Timer mit 4 Alarmen, 1 Echtzeituhr 2x programmierbare I/O-Blöcke (PIO), insgesamt 8 Zustandsmaschinen Flexible, benutzerprogrammierbare Hochgeschwindigkeits-I/O Kann Schnittstellen wie SD-Karte und VGA emulieren Hinweis: Raspberry Pi Pico W I/O-Spannung ist auf 3,3 V festgelegt. Downloads Datasheet Specifications of 3-pin Debug Connector
-

Elektor Academy Pro Raspberry Pi Pico with Arduino C/C++ (Programmierkurs)
Dieser komplette Mikrocontroller-Programmierkurs auf Basis des Raspberry Pi Pico umfasst ein Lehrbuch, ein Komponenten-Kit, praxisnahe Projekte sowie einen umfassenden Online-Kurs mit Simulationen. Er eignet sich ideal für das schrittweise Erlernen der Embedded-Programmierung mit Arduino anhand eines praktischen, hands-on Ansatzes. Eine praxisnahe Einführung in Embedded Systems mit dem Raspberry Pi Pico Dieser Kurs richtet sich an Personen ohne Vorkenntnisse im Bereich Embedded Systems, die einen strukturierten und beispielbasierten Einstieg suchen. Ein Kit bestehend aus LEDs und Widerständen, Schaltern, Sensoren und Aktoren, Displays, einem Breadboard und Kabeln sowie weiteren Komponenten ist enthalten. Diese werden im Kurs verwendet, um Beispielanwendungen zu veranschaulichen. Vorkenntnisse mit Arduino oder Embedded-Entwicklung sind nicht erforderlich. Jeder Abschnitt enthält praktische Beispiele und Mini-Projekte, die wichtige Konzepte festigen und zur weiteren Vertiefung anregen. Am Ende des Kurses werden Sie nicht nur in der Lage sein, die Beispiele nachzuvollziehen, sondern auch eigene Ideen und Anwendungen umzusetzen. Was werden Sie lernen? Mikrocontroller-Programmierung in C/C++ mit dem Raspberry Pi Pico unter Verwendung der Arduino IDE Arbeiten mit digitalen Ein- und Ausgängen, Auslesen von Tastern und Encodern, Steuern von LEDs und Relais Auslesen analoger Eingänge, Spannungen und analoger Sensoren Erzeugung analoger Ausgangssignale und PWM Verwendung serieller Kommunikation wie UART, I²C und SPI zur Steuerung von Displays und zum Auslesen digitaler Sensoren und SD-Karten Zeitmanagement Arbeiten mit Interrupts Echtzeit-Sensordatenerfassung und Steuerung über Taster, LEDs und Displays Steuerung von Aktoren wie Relais und Servomotoren Für wen ist dieser Kurs geeignet? Studierende und Selbstlerner im Bereich Embedded Systems Makers und IoT-Enthusiasten, die ihre Hardware-Kenntnisse verbessern möchten Lehrkräfte und Trainer, die sofort einsetzbares Unterrichtsmaterial suchen Was ist im Lieferumfang enthalten? Zugang zum vollständigen Kurs auf der Elektor Academy Pro-Lernplattform Raspberry Pi Pico Mikrocontroller-Board (+ USB-Kabel) Buch: Programming Microcontrollers in C/C++ Using Arduino Downloadbare Projektdateien für jedes Modul Komponenten-Set: 2× LED, rot, 5 mm LED, grün, 5 mm 3× Widerstand, 470 Ω, 0,25 W LDR Potentiometer, 10 kΩ, linear Taster Drehencoder-Modul Relaismodul DHT22 Feuchtigkeits- und Temperatursensor TM1637-kompatibles 4-stelliges 7-Segment-Display MPU-6050 IMU mit Stiftleisten SSD1306-kompatibles I²C OLED-Display Micro-SD-Kartenadapter mit Stiftleiste Buzzer SG90 Mikro-Servo ILI9341-kompatibles SPI 240×320 TFT-Display 20× Jumperkabel Breadboard Alle Programmierkurse (und Unterschiede im Inhalt) Kurs Arduino Raspberry Pi Pico with Arduino C/C++ ESP32 with Arduino C/C++ Raspberry Pi Pico with MicroPython ESP32 with MicroPython Online-Kurs Access to Arduino Course Access to Pico with Arduino C/C++ Course Access to ESP32 with Arduino C/C++ Course Access to Pico with MicroPython Course Access to ESP32 with MicroPython Course Board Uno R3 Raspberry Pi Pico ESP32 Raspberry Pi Pico ESP32 Buch Programming Microcontrollers in C/C++ Using Arduino Programming Microcontrollers in C/C++ Using Arduino Programming Microcontrollers in C/C++ Using Arduino Programming Microcontrollers in MicroPython Programming Microcontrollers in MicroPython Kit 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set
€ 69,95€ 59,95
Bestpreis
-
Elektor Academy Pro Raspberry Pi Pico with MicroPython (Programmierkurs)
Dieser komplette Mikrocontroller-Programmierkurs auf Basis des Raspberry Pi Pico umfasst ein Lehrbuch, ein Komponenten-Kit, praxisnahe Projekte sowie einen umfassenden Online-Kurs mit Simulationen. Er eignet sich ideal für das schrittweise Erlernen der Embedded-Programmierung mit Arduino anhand eines praktischen, hands-on Ansatzes. Eine praxisnahe Einführung in Embedded Systems mit dem Raspberry Pi Pico Dieser Kurs richtet sich an Personen ohne Vorkenntnisse im Bereich Embedded Systems, die einen strukturierten und beispielbasierten Einstieg suchen. Ein Kit bestehend aus LEDs und Widerständen, Schaltern, Sensoren und Aktoren, Displays, einem Breadboard und Kabeln sowie weiteren Komponenten ist enthalten. Diese werden im Kurs verwendet, um Beispielanwendungen zu veranschaulichen. Vorkenntnisse mit Arduino oder Embedded-Entwicklung sind nicht erforderlich. Jeder Abschnitt enthält praktische Beispiele und Mini-Projekte, die wichtige Konzepte festigen und zur weiteren Vertiefung anregen. Am Ende des Kurses werden Sie nicht nur in der Lage sein, die Beispiele nachzuvollziehen, sondern auch eigene Ideen und Anwendungen umzusetzen. Was werden Sie lernen? Programmierung von Mikrocontrollern in MicroPython mit dem Raspberry Pi Pico unter Verwendung der Thonny IDE Arbeiten mit digitalen Ein- und Ausgängen, Auslesen von Tastern und Encodern, Steuern von LEDs und Relais Auslesen analoger Eingänge, Spannungen und analoger Sensoren Erzeugung analoger Ausgangssignale und PWM Verwendung serieller Kommunikation wie UART, I²C und SPI zur Steuerung von Displays und zum Auslesen digitaler Sensoren und SD-Karten Zeitmanagement Arbeiten mit Interrupts Echtzeit-Sensordatenerfassung und Steuerung über Taster, LEDs und Displays Steuerung von Aktoren wie Relais und Servomotoren Für wen ist dieser Kurs geeignet? Studierende und Selbstlerner im Bereich Embedded Systems Makers und IoT-Enthusiasten, die ihre Hardware-Kenntnisse verbessern möchten Lehrkräfte und Trainer, die sofort einsetzbares Unterrichtsmaterial suchen Was ist im Lieferumfang enthalten? Zugang zum vollständigen Kurs auf der Elektor Academy Pro-Lernplattform Raspberry Pi Pico Mikrocontroller-Board (+ USB-Kabel) Buch: Programming Microcontrollers in MicroPython Downloadbare Projektdateien für jedes Modul Komponenten-Set: 2× LED, rot, 5 mm LED, grün, 5 mm 3× Widerstand, 470 Ω, 0,25 W LDR Potentiometer, 10 kΩ, linear Taster Drehencoder-Modul Relaismodul DHT22 Feuchtigkeits- und Temperatursensor TM1637-kompatibles 4-stelliges 7-Segment-Display MPU-6050 IMU mit Stiftleisten SSD1306-kompatibles I²C OLED-Display Micro-SD-Kartenadapter mit Stiftleiste Buzzer SG90 Mikro-Servo ILI9341-kompatibles SPI 240×320 TFT-Display 20× Jumperkabel Breadboard Alle Programmierkurse (und Unterschiede im Inhalt) Kurs Arduino Raspberry Pi Pico with Arduino C/C++ ESP32 with Arduino C/C++ Raspberry Pi Pico with MicroPython ESP32 with MicroPython Online-Kurs Access to Arduino Course Access to Pico with Arduino C/C++ Course Access to ESP32 with Arduino C/C++ Course Access to Pico with MicroPython Course Access to ESP32 with MicroPython Course Board Uno R3 Raspberry Pi Pico ESP32 Raspberry Pi Pico ESP32 Buch Programming Microcontrollers in C/C++ Using Arduino Programming Microcontrollers in C/C++ Using Arduino Programming Microcontrollers in C/C++ Using Arduino Programming Microcontrollers in MicroPython Programming Microcontrollers in MicroPython Kit 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set 40-teiliges Komponenten-Set
€ 69,95€ 59,95
Bestpreis
-
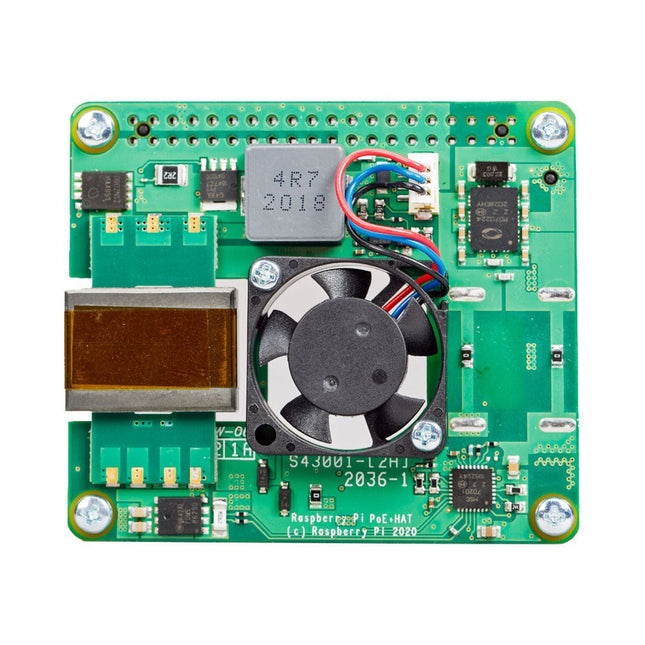
Raspberry Pi Foundation Raspberry Pi PoE+ HAT (für Raspberry Pi 3 B+ und 4)
Der Raspberry Pi PoE+ HAT ist eine Zusatzplatine für Raspberry Pi 3 B+ und Raspberry Pi 4 mit PoE-Pins. Er versorgt den Raspberry Pi über ein Ethernet-Kabel mit Strom, sofern kompatibles Power-Sourcing Equipment (PSE) im Ethernet-Netzwerk vorhanden ist. Zusätzlich verfügt der HAT über einen integrierten Lüfter zur Kühlung des Raspberry Pi-Prozessors. Technische Daten Standard IEEE 802.3at-2003 PoE Eingangsspannung 37-57 V DC, Klasse 4 Gerät Ausgangsspannung 5 V DC/4 A Kühlung 25 x 25 mm bürstenloser Lüfter mit 2,2 CFM zur Prozessorkühlung Betriebstemperatur 0°C bis +50°C Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi PoE+ Injector
Der Raspberry Pi PoE+ Injektor erweitert einen einzelnen Port eines Nicht-PoE-Ethernet-Switches um Power-over-Ethernet (PoE)-Funktionalität und überträgt Strom und Daten über ein einziges Ethernet-Kabel. Er bietet eine kostengünstige Plug-and-Play-Lösung für die schrittweise Einführung von PoE in bestehende Ethernet-Netzwerke. Der PoE+ Injektor ist ein 30-W-Gerät mit einem Port und eignet sich zur Stromversorgung von Geräten gemäß den Standards IEEE 802.3af und 802.3at, einschließlich aller Generationen von Raspberry Pi PoE HATs. Er unterstützt Netzwerk-Passthrough-Geschwindigkeiten von 10/100/1000 Mbit/s. Hinweis: Für den Betrieb ist ein separates IEC-Netzkabel erforderlich (nicht im Lieferumfang enthalten). Technische Daten Datenrate 10/100/1000 Mbit/s Eingangsspannung 100 bis 240 V AC Ausgangsleistung 30 W Leistungsabgabe an den Pins 4/5 (+), 7/8 (–) Nennausgangsspannung 55 V DC Datenanschlüsse Geschirmte RJ-45-, EIA 568A- und 568B Stromanschluss IEC C13-Netzeingang (nicht im Lieferumfang enthalten) Luftfeuchtigkeit bei Lagerung Maximal 95%, nicht kondensierend Betriebshöhe –300 m bis 3000 m Betriebsumgebungstemperatur 10°C bis +50°C Abmessungen 159 x 51,8 x 33,5 mm Downloads Datasheet
-
Raspberry Pi Foundation Raspberry Pi RP2040 Microcontroller (10 pcs)
Technische Spezifikationen Zwei ARM Cortex-M0+ mit 133 MHz 264 kB On-Chip-SRAM in sechs unabhängigen Bänken Unterstützung für bis zu 16 MB Off-Chip-Flash-Speicher über dedizierten QSPI-Bus DMA-Steuerung Vollständig angeschlossene AHB-Crossbar Interpolator- und Integer-Teiler-Peripherie On-Chip programmierbarer LDO zur Erzeugung der Kernspannung 2x On-Chip-PLLs zur Erzeugung von USB- und Kerntakten 30x GPIO-Pins, von denen 4 als Analogeingänge verwendet werden können Peripheriegeräte 2x UARTs 2x SPI-Steuerungen 2x I²C-Steuerungen 16x PWM-Kanäle USB 1.1-Controller und PHY, mit Host- und Geräteunterstützung 8x PIO-Zustandsmaschinen Was Sie erhalten 10x nackte RP2040-Chips
€ 7,95€ 3,18
Bestpreis
-
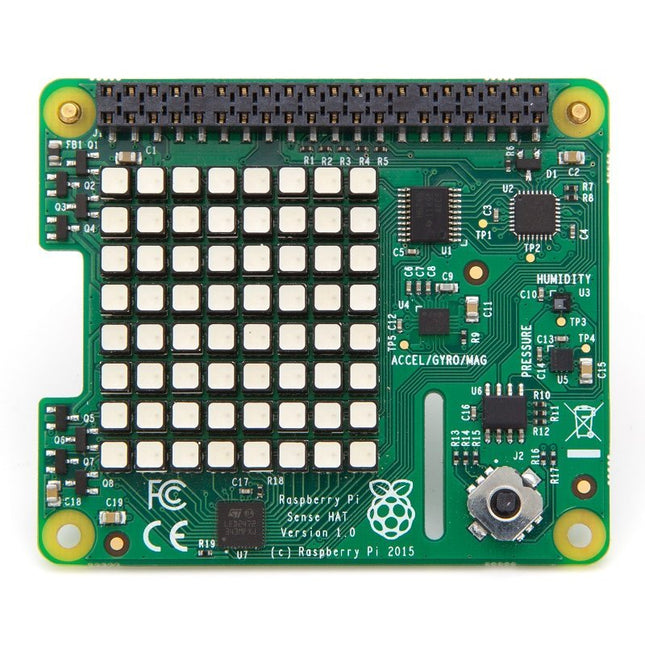
Raspberry Pi Foundation Raspberry Pi Sense HAT
Beim offiziellen Sense HAT der Raspberry Pi Foundation handelt es sich um ein Add-on-Board für Raspberry Pi (4, 3, 2, B+ und A+). Das Sense HAT verfügt über die folgenden Sensoren: 8x8 RGB-LED-Matrix-Display Accelerometer Gyroskop Magnetometer Luftdruck-Sensor Temperatur-Sensor Luftfeuchtigkeits-Sensor Joystick mit 5 Tastern
-

Raspberry Pi Foundation Raspberry Pi SSD (256 GB)
Die Raspberry Pi SSD bietet herausragende Leistung für I/O-intensive Anwendungen auf dem Raspberry Pi 5 und anderen Geräten, einschließlich superschneller Startzeiten beim Booten von der SSD. Es handelt sich um eine zuverlässige, reaktionsschnelle und leistungsstarke PCIe Gen 3-konforme SSD, die eine schnelle Datenübertragung ermöglicht und auch mit einer Kapazität von 512 GB erhältlich ist. Features 40k IOPS (4 kB zufällige Lesevorgänge) 70k IOPS (4 kB zufällige Schreibvorgänge) Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi SSD (512 GB)
Die Raspberry Pi SSD bietet herausragende Leistung für I/O-intensive Anwendungen auf dem Raspberry Pi 5 und anderen Geräten, einschließlich superschneller Startzeiten beim Booten von der SSD. Es handelt sich um eine zuverlässige, reaktionsschnelle und leistungsstarke PCIe Gen 3-konforme SSD, die eine schnelle Datenübertragung ermöglicht und auch mit einer Kapazität von 256 GB erhältlich ist. Features 50k IOPS (4 kB zufällige Lesevorgänge) 90k IOPS (4 kB zufällige Schreibvorgänge) Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi SSD Kit für Raspberry Pi 5 (256 GB)
Das Raspberry Pi SSD Kit enthält einen Raspberry Pi M.2 HAT+ mit einer Raspberry Pi NVMe SSD. Es ermöglicht eine herausragende Leistung für I/O-intensive Anwendungen auf dem Raspberry Pi 5, einschließlich eines superschnelles Starts beim Booten von der SSD. Das Raspberry Pi SSD Kit ist auch mit 512 GB Kapazität erhältlich. Features 40k IOPS (4 kB zufällige Lesevorgänge) 70k IOPS (4 kB zufällige Schreibvorgänge) Entspricht der Raspberry Pi HAT+ Spezifikation Lieferumfang 256 GB NVMe SSD M.2 HAT+ für Raspberry Pi 5 16 mm GPIO-Stacking-Header Montage-Hardware-Kit (Abstandshalter, Schrauben) Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi SSD Kit für Raspberry Pi 5 (512 GB)
Das Raspberry Pi SSD Kit enthält einen Raspberry Pi M.2 HAT+ mit einer Raspberry Pi NVMe SSD. Es ermöglicht eine herausragende Leistung für I/O-intensive Anwendungen auf dem Raspberry Pi 5, einschließlich eines superschnelles Starts beim Booten von der SSD. Das Raspberry Pi SSD Kit ist auch mit 256 GB Kapazität erhältlich. Features 50k IOPS (4 kB zufällige Lesevorgänge) 90k IOPS (4 kB zufällige Schreibvorgänge) Entspricht der Raspberry Pi HAT+ Spezifikation Lieferumfang 512 GB NVMe SSD M.2 HAT+ for Raspberry Pi 5 16 mm GPIO stacking header Mounting hardware kit (spacers, screws) Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi Touch Display 2
Das Raspberry Pi Touch Display 2 ist ein 7-Zoll-Touchscreen, der für Raspberry Pi entwickelt wurde und sich perfekt für interaktive Projekte wie Tablets, Unterhaltungssysteme und Informations-Dashboards eignet. Raspberry Pi OS enthält Touchscreen-Treiber, die Fünf-Finger-Touch und eine Bildschirmtastatur unterstützen, was eine vollständige Funktionalität ohne physische Tastatur oder Maus ermöglicht. Der Anschluss des 720 x 1280 Bildschirms an den Raspberry Pi erfordert nur zwei Verbindungen: Stromversorgung über den GPIO-Anschluss und ein Flachbandkabel zum DSI-Anschluss, der mit allen Raspberry Pi-Modellen außer der Raspberry Pi Zero-Reihe kompatibel ist. Technische Daten Display 7" TFT (720 x 1280 Pixel) Aktiver Bereich 88 x 155 mm Touchpanel Echtes kapazitives Multi-Touch-Touchpanel, das die Fünf-Finger-Berührung unterstützt Oberflächenbehandlung Blendfrei Farbkonfiguration RGB-Streifen Hintergrundbeleuchtungstyp LED B/L Lieferumfang 1x Raspberry Pi Touch Display 2 1x 22-poliges- auf 15-poliges Flachbandkabel für Raspberry Pi 5 1x 15-poliges- auf 15-poliges Flachbandkabel für Raspberry Pi 4 und älter 1x GPIO-Anschlusskabel 8x M2,5 Schrauben Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi USB 3.0 Hub
Der Raspberry Pi USB3-Hub erweitert die Konnektivität Ihres Geräts, indem er einen einzelnen USB-A-Anschluss in vier USB3.0-Anschlüsse umwandelt. Mit einem optionalen externen USB-C-Stromeingang kann es Peripheriegeräte mit hoher Leistung unterstützen, während Peripheriegeräte mit geringerer Leistung ohne zusätzliche Stromversorgung funktionieren. Der USB 3-Hub wurde vollständig auf nahtlose Kompatibilität mit allen Raspberry Pi-Produkten getestet. Features Einzelne Upstream-Verbindung: USB 3.0 Typ-A-Anschluss mit 8 cm langem Kabel Vier Downstream-Ports: USB 3.0 Typ-A-Ports für mehrere Geräteverbindungen Hochgeschwindigkeits-Datenübertragung: Unterstützt Geschwindigkeiten von bis zu 5 Gbit/s Kompatibilität: Funktioniert mit USB-3.0-Typ-A-Hostanschlüssen und ist abwärtskompatibel mit USB-2.0-Anschlüssen Downloads Datasheet
-

Raspberry Pi Foundation Raspberry Pi Zero 2 W
Raspberry Pi Zero 2 W ist der Nachfolger des bahnbrechenden Raspberry Pi Zero W. Das Board verfügt über eine Quad-Core 64-Bit Arm Cortex-A53 CPU, getaktet mit 1 GHz. Das Herzstück ist ein Raspberry Pi RP3A0 System-in-Package (SiP), in das ein Broadcom BCM2710A1 Chip mit 512 MB LPDDR2 SDRAM integriert ist. Der aufgerüstete Prozessor verleiht dem Raspberry Pi Zero 2 W 40% mehr Single-Thread-Leistung und 5x mehr Multi-Thread-Leistung als der ursprüngliche Single-Core Raspberry Pi Zero. Features 64-bit Quad-Core-Prozessor VideoCore IV GPU 512 MB LPDDR2 DRAM 802.11b/g/n wireless LAN Bluetooth 4.2 / Bluetooth Low Energy (BLE) MicroSD-Kartenslot Mini HDMI und USB 2.0-OTG-Anschlüsse Micro USB Stromversorgung HAT-kompatibler 40-Pin Header Composite Video und Reset-Pins via Testpunkte CSI-Kameraanschluss Technische Daten SoC Broadcom BCM2710A1 CPU 64-bit ARM Cortex-A53 (4x 1 GHz) GPU Broadcom VideoCore VI RAM 512 MB LPDDR2 Wireless LAN 2,4 GHz IEEE 802.11b/g/n Bluetooth Bluetooth 4.2, BLE USB 1x micro USB (für Daten)1x micro USB (für Stromversorgung) GPIO HAT-kompatibler 40-Pin GPIO-Header Video & Audio 1080P HD Video & Stereo-Audio via mini-HDMI-Anschluss SD-Karte microSD (für Betriebssystem und Datenspeicherung) Stromversorgung 5 VDC / 2,5 A (via micro USB Anschluss) Abmessungen 65 x 30 x 5 mm Raspberry Pi Zero 2 W ist Footprint-kompatibel zu früheren Zero-Modellen.
-

Raspberry Pi Foundation Raspberry Pi Zero 2 WH (mit Header)
Raspberry Pi Zero 2 WH ist der Nachfolger des bahnbrechenden Raspberry Pi Zero W(H). Das Board verfügt über eine Quad-Core 64-Bit Arm Cortex-A53 CPU, getaktet mit 1 GHz. Das Herzstück ist ein Raspberry Pi RP3A0 System-in-Package (SiP), in das ein Broadcom BCM2710A1 Chip mit 512 MB LPDDR2 SDRAM integriert ist. Der aufgerüstete Prozessor verleiht dem Raspberry Pi Zero 2 WH 40% mehr Single-Thread-Leistung und 5x mehr Multi-Thread-Leistung als der ursprüngliche Single-Core Raspberry Pi Zero. Features 64-bit Quad-Core-Prozessor VideoCore IV GPU 512 MB LPDDR2 DRAM 802.11b/g/n wireless LAN Bluetooth 4.2 / Bluetooth Low Energy (BLE) MicroSD-Kartenslot Mini HDMI und USB 2.0-OTG-Anschlüsse Micro USB Stromversorgung Mit montiertem 40-Pin Header Composite Video und Reset-Pins via Testpunkte CSI-Kameraanschluss Technische Daten SoC Broadcom BCM2710A1 CPU 64-bit ARM Cortex-A53 (4x 1 GHz) GPU Broadcom VideoCore VI RAM 512 MB LPDDR2 Wireless LAN 2,4 GHz IEEE 802.11b/g/n Bluetooth Bluetooth 4.2, BLE USB 1x micro USB (für Daten)1x micro USB (für Stromversorgung) GPIO HAT-kompatibler 40-Pin GPIO-Header Video & Audio 1080P HD Video & Stereo-Audio via mini-HDMI-Anschluss SD-Karte microSD (für Betriebssystem und Datenspeicherung) Stromversorgung 5 VDC / 2,5 A (via micro USB Anschluss) Abmessungen 65 x 30 x 5 mm Raspberry Pi Zero 2 WH ist Footprint-kompatibel zu früheren Zero-Modellen.























