Aus dem Inhalt
Lohnt sich der Selbstbau von Verstärkern noch?
Warum HiFi-Geräte unterschiedlich klingen
Elkos, Gleichrichter und ihr korrekter Einsatz
PPP-Endstufe mit der Röhre EL 84 T
Mittelwellen-Zweikreisempfänger
0-V-2-Kurzwellenaudion mit ECC 88
Kaffeewärmer mit Röhrenantrieb
Vielseitige Experimentierplatinen
Röhrensound-Konverter
Mikrofonverstärker mit Röhren
EL34, 6L6GC oder KT88
Magische Augen, Fächer und Bänder
Kampf den Exemplarstreuungen
Einfache Röhrenprüfung
Kummer mit minderwertigen Röhren
Das SRPP-Prinzip
Aus dem Inhalt
Neues von den Röhrenherstellern
Dem Klang auf der Spur
Wirkung und Anwendung von Gettermaterialien für Vakuum-Röhren
Klanghersteller und Klang beeinflussende Elemente im NF-Verstärker
Eintakt-A-Endstufe mit EL 156 in Trioden- und Pentodenschaltung
Kopfhörerverstärker mit Ausgangübertrager
Mehr Sound
My first Super
Netzfilter
Messfilter
Messergebnisse relativ, absolut und interpretiert
Welche Röhre klingt besser?
Moderne HiFi-Technik und DIN 45 500
Röhrenverstärker, Energieverbrauch und Recycling
Röhrendaten mit Sockelschaltungen
Aus dem Inhalt
Über ein Jahrhundert Triode
Neues vom Röhrenmarkt
Siebketten mit Drossel, Widerstand und Kondensatoren
Inserentenverzeichnis
Eintakt-A-Endstufe mit der Triode 833
Gegentakt-AB-Endstufe mit der 6C33
Gegentakt-Triodenstufe mit ECC 99 und ECC 832
Phonovorstufe in Röhrentechnik
Mehrkanalverstärker
High-End-Audio Digital-Analog-Converter (DAC)
Röhrensound mit Halbleitern
Leserbrief
CD-Two MKII
Röhrendaten mit Sockelschaltungen
Aus dem Inhalt
Sieben Jahre Elektor Röhren-Sonderhefte
Der Kompressionseffekt oder das Geheimnis des Schirmgitters
Phasenumkehrstufen
Gitterwiderstand und Gitterstrom
Eintakt-A-Endstufe mit der 6C33
Single-Ended-Endstufe mit der legendären Röhre 300B
Eintaktverstärker: Eine Handvoll gutklingender Watt
Parallel-Push-Pull-Monoblock mit 140 Watt
Ruhestromsteuerung von Röhrenendstufen mithilfe eines Mikrocontrollers
Kompakter Stereo-Röhrenverstärker mit der ECL 85
2-V-1-Audion für Mittel- und Kurzwelle
Hi-Fi-Röhren-Endstufe
Das Klanggeheimnis von sauerstofffreiem Kupferkabel
Stereo-Basisbreite
Röhrendaten mit Sockelschaltungen
Aus dem Inhalt
Neues von den Röhrenherstellern
Übertragereigenschaften
Röhrenverstärker im Kopfhörerbetrieb
Line-Vorverstärker mit Trioden
Eintakt-A-Endstufe mit KT 120
Leistungsstarke Gegentakt-AB-Endstufe mit KT 120
Elektronischer Laustärkesteller
Aktivantenne mit der Röhre EF 183
Wobbelgenerator zum Abgleich von Rundfunkempfängern
Die Sorgen mit dem bleifreien Lötzinn
Röhrengrenzdaten
Die 300B – ein Vergleich
Technik zum Anfassen
Röhrendaten mit Sockelschaltungen
Hinweis
Einige Platinenlayouts sind im Heft unscharf abgebildet worden. Die entsprechenden Zeichnungen stehen als PDF zum Download.
Röhren sind wieder „in". High-Tech-Audiogeräte wie MP3-Player, CD-Player oder der digitale Rundfunk kommen erst richtig zur Geltung, wenn ein Röhrenverstärker den perfekten Sound veredelt. Am Ausgang der PC-Soundkarte kann statt IC-bestückter Aktivboxen auch ein selbst gebautes Röhrengerät arbeiten. Der Einbau eigener Röhrenschaltungen in den PC selbst bringt den individuellen Geschmack erst richtig zur Geltung. Wenn statt einer LED das geheimnisvolle Glühen einer Röhrenkathode die Betriebsbereitschaft signalisiert, dann hebt sich das Gerät deutlich aus der Masse ab.
In der Regel arbeiten Röhren mit hohen Spannungen, was nicht ganz ungefährlich ist. Eine Röhre, die ursprünglich für eine Anodenspannung von 250 Volt entwickelt wurde, kann durchaus aber auch bei 12 Volt arbeiten. So gilt für dieses Buch prinzipiell: Röhrenschaltungen funktionieren auch mit ungefährlichen Spannungen.
Dieses Buch richtet sich an Leser, die technischen Abenteuern gegenüber aufgeschlossen sind. Teilweise handelt es sich um eine Reise zurück in die Geschichte der Röhrentechnik. Mehr als 50 Jahre alte Konzepte werden in einem neuen Gewand wieder entdeckt. Teilweise aber werden alte Röhren völlig neuartig eingesetzt. High-Tech und Tradition treffen hier aufeinander.
Röhrenverstärker produzieren Verzerrungen. Aber abweichend von den üblichen Standardschaltungen existieren Schaltungsvarianten, die sich durch minimale Klirrfaktoren bei außerordentlich großen Ausgangsamplituden von 50 oder gar 100Vp auszeichnen. Solche Verstärkerstufen wurden unter den Bezeichnungen SRPP, µ-Follower und _-Follower bekannt.Eine große Zahl von Veröffentlichungen setzt sich mit diesen besonderen Schaltungen auseinander – leider aber auch häufig in fehlerhafter Form. Ganz offenbar steckt der Teufel im Detail. Ohne ausreichende Kenntnis der hinter diesen reizvollen Konzepten stehenden Theorie und den daraus abzuleitenden Dimensionierungsvorschriften besteht die Gefahr, die exzellenten Eigenschaften von SRPPs und deren Verwandten zunichte zu machen.Im ersten Teil des vorliegenden Buches werden die Ursachen von Verzerrungen untersucht; anschließend geht es um die praktische Umsetzung der theoretischen Hintergründe.Röhren-Interessierten wird nicht entgangen sein, dass das Internet eine Fülle von meist ausgesprochen aufwendig konzeptionierten Schaltungen bietet. Aufmerksames und kritisches Überprüfen solcher Entwürfe beweist aber in fast allen Fällen, dass solche „Exoten“ bei Weitem nicht die Übertragungsqualitäten erreichen, die sie zu versprechen vorgeben. In einem gesonderten Kapitel über fehlerhafte SRPPs und µ-Follower wird gezeigt, wie teilweise bizarr anmutende Fehler zu Schaltungen führen, die dann einfacher und zielführender durch gängige Standardschaltungen zu ersetzen wären.Des Weiteren werden Gegentakt-Endstufen und ihr Zusammenwirken mit SRPPs genauer besprochen. Ausgehend von der Urversion der gegen Ende der Röhrenära entwickelten eisenlosen Endstufe (OTL) – der HF 303 von Philips – wird vertieft auf diese äußerst bemerkenswerte Variante der Röhren-Leistungsverstärker eingegangen.Nicht zuletzt wird die Aufmerksamkeit auch auf den Frequenzgang und das Übertragungsverhalten, die Netzteile und die nicht ganz unkomplizierte Heizungsversorgung der Röhrenverstärker gerichtet.Auch die Praxis kommt nicht zu kurz: Für einige der besprochenen Schaltungsentwürfe wurden ausführliche konkrete Hinweise für deren praktische Realisierung in diesem Buch mit aufgenommen.
Der im Raspberry Pi 5 verwendete Power-Management-IC enthält eine Echtzeituhr und einen Ladeschaltkreis für eine Knopfzelle, die die Uhr mit Strom versorgen kann, wenn die Hauptstromversorgung unterbrochen ist.
Diese Panasonic ML-2020 Lithium-Mangandioxid-Batterie mit einem zweipoligen Stecker und einem doppelseitigen Klebepad kann direkt an den Batterieanschluss des Raspberry Pi 5 angeschlossen und an der Innenseite eines Gehäuses oder an einer anderen geeigneten Stelle angebracht werden.
Die Antenne ermöglicht den Empfang von L-Band-Satelliten, die zwischen 1525 und 1660 MHz senden, wie z. B. Inmarsat, Iridium und GPS. Bitte beachten Sie, dass es NICHT für den Empfang schwächerer Signale wie HRPT und GOES geeignet ist, für die eine Parabolantenne erforderlich ist.
Der Patch wird mit nützlichem Montagezubehör geliefert, darunter ein Fenstersaugnapf, ein biegsames Stativ und ein 3M RG174-Koaxialkabel. Der Patch und die aktiven Schaltkreise sind in einem wetterfesten Gehäuse untergebracht.
Links
Inmarsat STD-C EGC
AERO Satellite ACARS
AERO C-Channel Voice
Iridium Decoding
GPS and GNSS Experiments
Dieser Filter unterdrückt Signale zwischen 88 und 108 MHz mit einer Dämpfung von etwa 50 dB oder mehr. Ein FM-Rundfunk-Bandsperrfilter ist für die Verwendung mit SDRs sehr nützlich, da FM-Rundfunksignale in manchen Gegenden so stark sein können, dass sie den SDR überlasten, was zu einer sehr schlechten Leistung in anderen Bändern führt. Sie können erkennen, ob dies bei Ihnen der Fall ist, wenn Sie Bilder von BCFM-Sendern oder Störungen sehen, die bei anderen Frequenzen wie ein WFM-Signal aussehen, wenn Sie die Verstärkung erhöhen.
Der Filter basiert auf einem einfachen Tschebyscheff-Design 7. Ordnung. Die 3-dB-Absenkung erfolgt bei 76 MHz und 122 MHz. 88 MHz werden um fast 60 dB und 108 MHz um 45–50 dB gedämpft. Außerhalb des Durchlassbandes beträgt die Einfügungsdämpfung unter 500 MHz praktisch Null, zwischen 500 MHz und 1 GHz weniger als 0,5 dB und zwischen 1 und 2 GHz weniger als 1, dB. Zwischen 2 und 3 GHz nimmt die Leistung leicht ab, aber die Einfügungsdämpfung bleibt bei den meisten Frequenzen unter 1,5 dB. Der Filter kann außerdem bis zu 80 mA Gleichstrom durchlassen (wahrscheinlich mehr) und hat einen vernachlässigbaren Gleichstromwiderstand.
Der Filter wird in einem 28 x 28 x 1 mm großen Aluminiumgehäuse geliefert und verfügt an beiden Enden über weibliche SMA-Anschlüsse. Im Paket enthalten ist auch ein gerader SMA-Stecker-auf-SMA-Stecker-Adapter.
RTL-SDR ist ein erschwinglicher Dongle, der als computergestützter Radioscanner für den Empfang von Live-Radiosignalen zwischen 500 kHz und 1,75 GHz in Ihrer Umgebung verwendet werden kann.
Der RTL-SDR V4 bietet eine Reihe von Verbesserungen, darunter die Verwendung des R828D-Tunerchips, einen dreifachen Eingangsfilter, einen Notch-Filter, verbesserte Komponententoleranzen, einen temperaturkompensierten Oszillator (TCXO) mit 1 PPM, einen SMA-F-Anschluss, ein Aluminiumgehäuse mit passiver Kühlung, eine Bias-Tee-Schaltung, eine verbesserte Stromversorgung und einen eingebauten HF-Aufwärtswandler.
RTL-SDR V4 wird mit dem tragbaren Dipolantennen-Set geliefert. Es eignet sich hervorragend für Einsteiger, da es terrestrischen und Satellitenempfang ermöglicht, sich einfach im Freien montieren lässt und für den mobilen und vorübergehenden Einsatz im Freien konzipiert ist.
Features
Verbesserter HF-Empfang: V4 verwendet jetzt einen integrierten Aufwärtswandler anstelle einer direkten Abtastschaltung. Dies bedeutet keine Nyquist-Faltung von Signalen um 14,4 MHz mehr, verbesserte Empfindlichkeit und einstellbare Verstärkung auf HF. Wie beim V3 bleibt der untere Abstimmbereich bei 500 kHz und ein sehr starker Empfang erfordert möglicherweise immer noch eine Dämpfung/Filterung am vorderen Ende.
Verbesserte Filterung: Der V4 nutzt den R828D-Tuner-Chip, der über drei Eingänge verfügt. Der SMA-Eingang wurde als Triplex-Eingang in drei Bänder umgewandelt: HF, VHF und UHF. Dies sorgt für eine gewisse Isolierung zwischen den drei Bändern, was bedeutet, dass Störungen außerhalb des Bandes durch starke Rundfunksender weniger wahrscheinlich zu Desensibilisierung oder Bildgebung führen.
Verbesserte Filterung x2: Zusätzlich zum Triplexing kann auch der offene Drain-Pin am R828D verwendet werden, der das Hinzufügen einfacher Kerbfilter für gängige Interferenzbänder wie Broadcast AM, Broadcast FM ermöglicht und die DAB-Bänder. Diese dämpfen nur um ein paar dB, können aber dennoch helfen.
Verbessertes Phasenrauschen bei starken Signalen: Aufgrund eines verbesserten Netzteildesigns wurde das Phasenrauschen durch Netzteilrauschen deutlich reduziert.
Weniger Wärme: Ein weiterer Vorteil der verbesserten Stromversorgung ist der geringere Stromverbrauch und die geringere Wärmeentwicklung im Vergleich zum V3.
Lieferumfang
1x RTL-SDR V4 Dongle (R828D RTL2832U 1PPM TCXO SMA)
2x 23 cm bis 1 m Teleskopantenne
2x 5 cm bis 13 cm Teleskopantenne
1x Dipolantennenfuß mit 60 cm RG174
1x 3 m RG174-Verlängerungskabel
1x Flexible Stativhalterung
1x Saugnapfhalterung
Downloads
Datasheet
User Guide
Quick Start Guide
SDR# User Guide
Dipole Antenna Guide
LoRa HAT, ein Datenübertragungsmodul mit geringem Stromverbrauch, verfügt über einen integrierten CH340 USB-zu-UART-Konverter, einen Spannungspegelumsetzer (74HC125V), einen SMA-Antennenanschluss E22-900T22S und E22-400T22S, einen IPEX-Antennenanschluss und die LoRa Spread Spectrum Modulation-Technologie Automatische mehrstufige Wiederholung.
Merkmale
Integriertes 1,14-Zoll-LCD
Spannungspegelumsetzer (74HC125V)
Kommunikationsreichweite bis zu 5 km
Unterstützt automatische Wiederholung, um längere Übertragungen zu ermöglichen
Energieeffizient
Hochsicher
Zur Bewertung der Signalqualität mit dem RSSI oder „Received Signal Strength Indicator“
Unterstützung der drahtlosen Parameterkonfiguration
Unterstützung für Festpunktübertragung
SMA- und IPEX-Antennenanschluss USB-zu-LoRa- und Pico-zu-LoRa-Kommunikation über UART
Wird mit Entwicklungsressourcen und Handbuch geliefert
LED-Anzeigen:
RXD/TXD: UART RX/TX-Anzeige
AUX: Zusatzanzeige
PWR: Betriebsanzeige
Jumper zur Auswahl von Seriell/USB:
A: USB TO UART zur Steuerung des LoRa-Moduls über USB
B: Steuern Sie das LoRa-Modul über Raspberry Pi Pico
Jumper zur Auswahl des Daten-/Befehlsmodus:
Kurz M0, kurz M1: Übertragungsmodus
M0 kurzschließen, M1 öffnen: Konfigurationsmodus
M0 öffnen, M1 kurzschließen: WOR-Modus
Öffnen Sie M0, öffnen Sie M1: Tiefschlafmodus
Spezifikationen
Frequenz: 850,125–930,125 MHz / 410–493 MHz (programmierbarer Bereich)
Leistung: 22 dBm
Entfernung: Bis zu 5 km
Schnittstelle: UART-Kommunikation
Serielles Portmodul: E22-900T22S1B / E22-400T22S
Spannungspegelumsetzer: 74HC125V
Inbegriffen
1x LoRa- Modul
1x Antenne
Hinweis: Raspberry Pi Board ist nicht im Lieferumfang enthalten.
Downloads
GitHub
Wiki
Das Raspberry Pi Pico Breadboard Kit hilft dem Benutzer, die GPIOs des Raspberry Pi Pico für die Verwendung mit externen Geräten zu konfigurieren.
Das Raspberry Pi Pico Breadboard Kit ist ein vielseitiges Kit, das aus einem "400-Punkte-Halb-Size-Breadboard" oben, einem programmierbaren Buzzer, 4 programmierbaren LEDs, 4 Druckknöpfen und dedizierten 5 V-, 3V3- und GND-Pins an einem einzigen Ort besteht. SB Components entwickelte das Raspberry Pi Pico Breadboard Kit mit fortschrittlichen Funktionen wie unabhängig steuerbaren LEDs, Schaltern und einem 400-Punkte-Halb-Size-Breadboard, das dem Benutzer eine effiziente Prototypenerstellung ihrer Projekte mit dem Raspberry Pi Pico ermöglicht.
Das Raspberry Pi Pico Breadboard Kit kann mit dem Raspberry Pi Pico verbunden werden, mit dem ein Benutzer Elektronik-Experimente, Prototypen, Mini-Roboter, Spiele, die Interaktion mit einem Linux-fähigen Raspberry Pi, die Erkundung von Schaltungen usw. durchführen kann. Man kann auch externe Komponenten mit dem auf dem Raspberry Pi Pico Breadboard Kit bereitgestellten Breadboard verbinden.
Features
Vier unabhängig steuerbare LEDs
Vier unabhängig steuerbare Druckknöpfe
Kompatibel mit dem Pico
Ein 400-Punkte-Halb-Size-Breadboard
Programmierbarer Buzzer
Dedizierte 5V-, 3V3- und Gnd-Pins für eine einfache Verwendung
Spezifikationen
Betriebsspannung
3,3 VDC
Kommunikationsschnittstelle
GPIO
Abmessungen
85 x 133 mm
Anwendungen
Elektrische Experimente
Prototypen
Mini-Roboter
Spiele
Erkundung von Schaltungen
Downloads
Anleitung
Beispielcodes
Schaltungsdiagramm
GitHub
Lieferumfang
1x Pico Breadboard Kit
5x männlich-männlich Jumper-Kabel
5x weiblich-weiblich Jumper-Kabel
5x männlich-weiblich Jumper-Kabel
Der Pico Cube ist ein 4x4x4 LED-Würfel-HAT für den Raspberry Pi Pico mit einer Betriebsspannung von 5 VDC. Der Pico Cube, ein monochromatisches Grün mit 64 LEDs, ist eine unterhaltsame Möglichkeit, Programmieren zu lernen. Er wurde entwickelt, um Glühbetrieb mit geringem Energieverbrauch, robuster Optik und einfacher Installation auszuführen, so dass Menschen/Kinder/Benutzer die Effekte von LED-Leuchten mit einem unterschiedlichen Farbmuster durch die Kombination von Software und Hardware, d.h. Raspberry Pi Pico, kennenlernen können.
Features
Standard 40 Pins Raspberry Pi Pico Header
Kommunikation über GPIO
64 hochintensive monochromatische LEDs
Einzeln ansteuerbare LEDs
Zugriff auf jede Schicht
Technische Daten
Betriebsspannung: 5 V
Farbe: Grün
Kommunikation: GPIO
LEDs: 64
Lieferumfang
1x Pico Cube Base PCB
4x Layer PCB
8x Pillar PCB
2x Male Berg (1 x 20)
2x Female Berg (1 x 20)
70 LEDs
Hinweis: Der Raspberry Pi Pico ist nicht im Lieferumfang enthalten.
Downloads
GitHub
Wiki
Der Pico Cube ist ein 4x4x4 LED-Würfel-HAT für den Raspberry Pi Pico mit einer Betriebsspannung von 5 VDC. Der Pico Cube, ein monochromatisches Rot mit 64 LEDs, ist eine unterhaltsame Möglichkeit, Programmieren zu lernen. Er wurde entwickelt, um Glühbetrieb mit geringem Energieverbrauch, robuster Optik und einfacher Installation auszuführen, so dass Menschen/Kinder/Benutzer die Effekte von LED-Leuchten mit einem unterschiedlichen Farbmuster durch die Kombination von Software und Hardware, d.h. Raspberry Pi Pico, kennenlernen können.
Features
Standard 40 Pins Raspberry Pi Pico Header
Kommunikation über GPIO
64 hochintensive monochromatische LEDs
Einzeln ansteuerbare LEDs
Zugriff auf jede Schicht
Technische Daten
Betriebsspannung: 5 V
Farbe: Rot
Kommunikation: GPIO
LEDs: 64
Lieferumfang
1x Pico Cube Base PCB
4x Layer PCB
8x Pillar PCB
2x Male Berg (1 x 20)
2x Female Berg (1 x 20)
70 LEDs
Hinweis: Der Raspberry Pi Pico ist nicht im Lieferumfang enthalten.
Downloads
GitHub
Wiki
Das Interesse an Röhrenschaltungen ist wach...
Gerade im Audiosektor gibt es nach wie vor eine beträchtliche Gruppe ernstzunehmender Fachleute (darunter viele Musiker), die von der klanglichen Überlegenheit neuer und auch alter Röhrentechnologie überzeugt sind. Röhrenverstärker – chromblitzende, z.T. äußerlich ungewöhnlich gestylte Geräte, in denen nicht nur viel elektronisches, mindestens genauso viel handwerkliches Know How steckt – sind für sie "State of the Art" der Klangreproduktion. Wer's nicht glaubt: ein Gang über diverse Audio-Messen ("High-End") überzeugt; sowohl einige der renommierten Großanbieter deutscher, amerikanischer und japanischer Provinienz als auch kleine (aber feine) Firmen bieten Röhrenverstärker. Exzellente, in Handarbeit gefertigte Geräte, seien optisch und klanglich, davon sind Röhrenanhänger fest überzeugt, selbst durch transistorisierte "High-Ender" nun einmal nicht zu schlagen.
Alles hat seine Geschichte...
Die Grundlagen moderner Reproduktionstechnik, das gilt für beide Verstärkertypen gleichermaßen, reichen mittlerweile rund sechzig bis siebzig Jahre zurück in die Zeit, als die Entwicklung und der Einsatz der ersten Kinoverstärker mit dem Aufkommen des Tonfilms realisiert wurden. Wichtige Impulse gab dabei die Vervollkommnung der Aufnahme- und Wiedergabewandler für die Verstärker, die möglichst verzerrungsarm (oder besser das, was man damals darunter verstand) ein relativ breites Frequenzband verarbeiten mussten. Auf der Suche nach Perfektion waren die 40er- und 50er-Jahre besonders bedeutsam: in dieser Zeit wurden Forderungen formuliert und Standards gesetzt, auf denen letztlich unsere modernen Qualitätsanforderungen im Audiobereich basieren.
Dieses Buch wirft einen Blick mit den Schwerpunkten
Erfindung der Elektronenröhre
Entwicklung der Röhren-Audiotechnik und
einer kommentierten Schaltungsdokumentation auf eben diese Geschichte der Reproduktionstechnik in der Röhrenära.
Dieses Buch enthält eine Sammlung von Artikeln aus der Zeitschrift Elektor zum Thema „Audiotechnik". Die vorgestellten Schaltungen beschäftigen sich nicht nur mit der Klangwiedergabe, sondern beginnen dort, wo hörenswerte Aufnahmen ihren Ursprung haben: beim bezahlbaren und anspruchsvollen Mikrofon-Vorverstärker.
Es folgen u. a. Endstufen, Ergänzungen zu Soundkarten und nicht zuletzt Boxen-Bauvorschläge. Dabei kommt die Theorie nur soweit zu Wort, wie sie für das Verständnis erforderlich ist. Schnell folgt alles, was zur Verwirklichung der Idee notwendig ist: genaue Baupläne mit Platinenlayout, Stückliste und Bestückungsplan, Aufbauanleitung, Beschaffungshinweise für schwer erhältliche Bauteile, Abgleichhinweise usw. Ein Leistungsverstärker, der genügend Power für Veranstaltungssäle, Diskos und Theater bietet, rundet das Angebot ab.
Um die Bauvorhaben erfolgreich zu realisieren, sollten einige Grundkenntnisse im Aufbau elektronischer Schaltungen und – noch wichtiger – etwas Übung im praktischen Aufbau und im Löten vorhanden sein.
Schrittweise Einführung in das praktische Schaltungsdesign
Der Einstieg in die Elektronik ist nicht so schwierig, wie man vielleicht denkt. Mit diesem Buch werden die wichtigsten Konzepte der Elektrotechnik und Elektronik auf spielerische Weise erkundet, indem verschiedene Experimente durchgeführt und Schaltungen simuliert werden. Es vermittelt Elektronik praxisnah, ohne in komplexen Fachjargon oder lange Berechnungen einzutauchen. Dadurch werden schon bald eigene Projekte ermöglicht.
Es sind keine Vorkenntnisse in Elektronik erforderlich; lediglich einige grundlegende Algebra-Kenntnisse werden in wenigen einfachen Berechnungen verwendet. Viele getestete und funktionierende Projekte und Simulationen werden vorgestellt, um mit dem Aufbau elektronischer Schaltungen vertraut zu werden. Für problemloses Experimentieren – ohne die Gefahr, etwas zu beschädigen – werden zudem frühzeitig auch softwarebasierte Schaltungssimulationen vorgestellt.
Lernziele:
Konzepte von Spannung, Strom und Leistung
Wechselstrom (AC) und Gleichstrom (DC)
Grundlegende Lampenschaltungen mit Schaltern
Passive Bauteile: Widerstände, Kondensatoren und Induktivitäten
RC- und RCL-Schaltungen und Elektromagnetismus
Lautsprecher, Relais, Summer und Transformatoren
Aktive Bauteile: Dioden und LEDs, Bipolartransistoren und MOSFETs
Transistorbasierte Schaltungen
Optokoppler-Schaltungen
Astabile und monostabile Multivibratoren
Verwendung des 555-Timer-ICs
Operationsverstärkertechnik
Digitale Logik
Beispiele: Verstärker, Oszillatoren, Filter und Sensoren
Test- und Messwerkzeuge
Mikrocontroller: Arduino Uno, ESP32, Raspberry Pi Pico und Raspberry Pi
Datenblätter lesen und Auswahl von Komponenten
EMV & EMI sowie Normen & Vorschriften
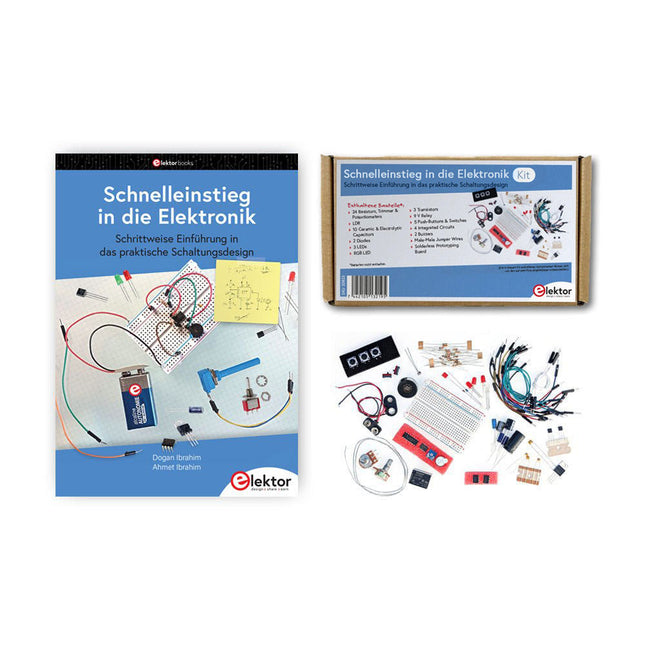
Der Einstieg in die Elektronik ist einfacher, als Sie denken! Mit diesem Bundle – bestehend aus Buch und Experimentierkit – entdecken Sie die Grundlagen der Elektro- und Elektroniktechnik Schritt für Schritt. Anhand spannender Experimente lernen Sie praxisnah und verständlich, ganz ohne komplizierte Fachbegriffe oder langwierige Berechnungen. So sind Sie schon bald in der Lage, Ihre eigenen Elektronikprojekte umzusetzen!
Das Kit enthält alle notwendigen Komponenten, um die meisten im Buch beschriebenen Schaltungen direkt auf dem Steckbrett aufzubauen und praktisch zu erproben.
Das Kit kann selbstverständlich auch ohne das Buch zum Aufbau anderer Schaltkreise und zur Durchführung eigener Experimente verwendet werden.
Inhalt des Kits
1x 39 Ω, 1 W Widerstand
1x 47 Ω Widerstand
1x 180 Ω Widerstand
1x 330 Ω Widerstand
3x 1 kΩ Widerstand
1x 2,2 kΩ Widerstand
1x 3,9 kΩ Widerstand
1x 6,8 kΩ Widerstand
1x 10 kΩ Widerstand
1x 15 kΩ Widerstand
1x 22 kΩ Widerstand
1x 33 kΩ Widerstand
1x 47 kΩ Widerstand
1x 56 kΩ Widerstand
1x 82 kΩ Widerstand
1x 120 kΩ Widerstand
1x 680 kΩ Widerstand
2x 100 kΩ Widerstand
1x 10 kΩ Trimmer
1x 10 kΩ Linearpotentiometer
1x 100 kΩ Linearpotentiometer
1x LDR
1x 1 nF Keramikkondensator
2x 10 nF Keramikkondensator
1x 100 nF Keramikkondensator
1x 1 µF, 25 V Aluminium-Elektrolytkondensator
2x 10 µF, 25 V Aluminium-Elektrolytkondensator
1x 100 µF, 25 V Aluminium-Elektrolytkondensator
1x 470 µF, 25 V Aluminium-Elektrolytkondensator
1x 1000 µF, 25 V Aluminium-Elektrolytkondensator
1x RGB-LED, Common-Cathode (CC)
1x 1N4148 Kleinsignaldiode
1x 1N4733A 5,1 V, 1 W Zenerdiode
3x LED, rot
2x BC337 NPN-Transistor
1x IRFZ44N N-Kanal-MOSFET
2x NE555-Timer
1x LM393-Komparator
1x 74HCT08 Quad-AND-Gatter
3x Tastschalter
2x SPDT-Schalter
1x Relais, SPDT, 9 VDC
1x Aktiver Summer
1x Passiver Summer
50 cm Massivdraht, 16 AWG, ohne Mantel
2x PP3 9 V Batterieclip
1x Steckbrett
20x Überbrückungskabel
Dieses Bundle enthält:
Buch: Schnelleinstieg in die Elektronik (Einzelpreis: 45 €)
Kit: Schnelleinstieg in die Elektronik (Wert: 45 €)
Schrittweise Einführung in das praktische Schaltungsdesign
Der Einstieg in die Elektronik ist nicht so schwierig, wie man vielleicht denkt. Mit diesem Buch werden die wichtigsten Konzepte der Elektrotechnik und Elektronik auf spielerische Weise erkundet, indem verschiedene Experimente durchgeführt und Schaltungen simuliert werden. Es vermittelt Elektronik praxisnah, ohne in komplexen Fachjargon oder lange Berechnungen einzutauchen. Dadurch werden schon bald eigene Projekte ermöglicht.
Es sind keine Vorkenntnisse in Elektronik erforderlich; lediglich einige grundlegende Algebra-Kenntnisse werden in wenigen einfachen Berechnungen verwendet. Viele getestete und funktionierende Projekte und Simulationen werden vorgestellt, um mit dem Aufbau elektronischer Schaltungen vertraut zu werden. Für problemloses Experimentieren – ohne die Gefahr, etwas zu beschädigen – werden zudem frühzeitig auch softwarebasierte Schaltungssimulationen vorgestellt.
Lernziele:
Konzepte von Spannung, Strom und Leistung
Wechselstrom (AC) und Gleichstrom (DC)
Grundlegende Lampenschaltungen mit Schaltern
Passive Bauteile: Widerstände, Kondensatoren und Induktivitäten
RC- und RCL-Schaltungen und Elektromagnetismus
Lautsprecher, Relais, Summer und Transformatoren
Aktive Bauteile: Dioden und LEDs, Bipolartransistoren und MOSFETs
Transistorbasierte Schaltungen
Optokoppler-Schaltungen
Astabile und monostabile Multivibratoren
Verwendung des 555-Timer-ICs
Operationsverstärkertechnik
Digitale Logik
Beispiele: Verstärker, Oszillatoren, Filter und Sensoren
Test- und Messwerkzeuge
Mikrocontroller: Arduino Uno, ESP32, Raspberry Pi Pico und Raspberry Pi
Datenblätter lesen und Auswahl von Komponenten
EMV & EMI sowie Normen & Vorschriften
Der nRSP-ST ist ein vernetzter Funkempfänger mit allgemeiner Abdeckung für Frequenzen von 1 kHz bis 2 GHz mit einer Spektrumssichtbarkeit von bis zu 10 MHz. Der nRSP-ST ist Ihr persönlicher, aus der Ferne zugänglicher SDR, der auch mit einer kleinen Anzahl vertrauenswürdiger Freunde oder Kollegen geteilt werden kann.
Der nRSP-ST richtet sich an die Bedürfnisse von Radioenthusiasten, die eine "Plug-and-Play"-Lösung für den Fernempfang wünschen. Um dies zu erreichen, haben wir mit der Entwicklung eines neuartigen IQ Lite-Modus, der Kanäle mit IQ-Daten effizient bereitstellt, die typischen Einschränkungen der Internetbandbreite angegangen. Wir führen außerdem die Möglichkeit ein, IQ-Aufzeichnungen am entfernten Standort zu steuern und zu speichern. Der nRSP-ST ist ideal für alle, die einen Breitband-Fernempfänger wünschen, ohne Computerkenntnisse und stundenlange Einrichtungszeit sowie laufende Wartung am entfernten Standort zu benötigen.
Features
"Plug and Play" integrierter, vernetzter Allgemeinversorgungsempfänger:
Kombiniert einen Empfänger, einen Host-Computer und vieles mehr – alles in einer Box!
Schließen Sie die Stromversorgung an und stellen Sie eine Verbindung zum Internet (Ethernet oder WLAN) her, und schon ist der nRSP-ST automatisch von überall aus erreichbar
Die plattformübergreifende SDRconnect-Software unterstützt den lokalen Betrieb oder den Fernzugriff auf Windows-, MacOS- oder Linux-Plattformen
Das nRSP-ST & SDRconnect ist für die verfügbare Netzwerkbandbreite konfigurierbar:
Im Full IQ-Modus bietet der nRSP-ST IQ-Datenübertragung der sichtbaren Spektrumsbandbreite (z. B. für Hochgeschwindigkeits-LAN oder superschnelle Internetkonnektivität)
Im IQ Lite-Modus stellt der nRSP-ST IQ-Daten von Kanälen mit einer Breite von bis zu 192 kHz bereit (z. B. für die digitale Dekodierung durch den Client).
Im Kompakt-Modus stellt der nRSP-ST komprimiertes Audio bereit (ideal für langsamere Internetverbindungen)
Unterstützt mehrere Client-Verbindungen mit einer gleichzeitigen Mischung von Verbindungsmodi – ein Admin-Tool ermöglicht es Ihnen, vertrauenswürdigen Freunden oder Kollegen Benutzernamen und Timeouts zuzuweisen.
Alle Modi unterstützen die Visualisierung einer Spektrumsbandbreite von bis zu 10 MHz
Zwei Remote-Verbindungsoptionen:
Verwenden Sie einen Remote-SDRconnect-Client oder
Verwenden Sie den integrierten Webserver für den Fernzugriff von jedem Gerät, das zum Surfen im Internet geeignet ist, einschließlich Android-/iOS-Tablets und -Telefonen
Der nRSP-ST bietet die Möglichkeit, IQ- und Audiodateien auf einem NAS-Gerät (Network Attached Storage) aufzuzeichnen, sofern im LAN verfügbar.
Der 14-Bit-ADC-Breitband-SDR-Empfänger mit vollem Funktionsumfang deckt alle Frequenzen von 1 kHz über VLF, LF, MW, HF, VHF, UHF und L-Band bis 2 GHz lückenlos ab.
Überwachen Sie bis zu 10 MHz Spektrum gleichzeitig aus der Ferne mit einer Auswahl von 3 Antennen
Flash aktualisierbar für zukünftige Funktionserweiterungen
Lieferumfang
1x nRSP-ST Receiver
1x WLAN-Antenne
1x Netzteil
1x Manual
Downloads
Release notes
Software
Der SDRplay RSPduo ist ein hochleistungsfähiger 14-Bit-SDR-Empfänger mit zwei Tunern. In einem hochwertigen Stahlgehäuse untergebracht, kann jeder Tuner einzeln im Bereich von 1 kHz bis 2 GHz mit bis zu 10 MHz Bandbreite oder beide Tuner können gleichzeitig im Bereich von 1 kHz bis 2 GHz mit bis zu 2 MHz Bandbreite pro Tuner arbeiten.
Dank einer hochstabilen Referenz und externen Taktgebern eignet sich dieses Gerät ideal für industrielle, wissenschaftliche und Bildungsanwendungen.
Features
Dual-Tuner bietet unabhängige Abdeckung von 1 kHz bis 2 GHz unter gleichzeitiger Verwendung von 2 Antennenanschlüssen
14-Bit-ADC-Siliziumtechnologie
Bis zu 10 MHz sichtbare Bandbreite (Single-Tuner-Modus) oder 2 Slices von 2 MHz Spektrum (Dual-Tuner-Modus)
3 per Software auswählbare Antennenanschlüsse (2x 50Ω und 1x 1kΩ hochohmiger symmetrischer/unsymmetrischer Eingang)
Hochohmiger Antennenanschluss (1 kHz bis 30 MHz) mit wählbarem MW-Sperrfilter und 2 Vorselektionsfiltern zur Auswahl
Per Software wählbare AM/FM- und DAB-Rundfunkband-Sperrfilter für die 2 SMA-Antennenanschlüsse (1 kHz bis 2 GHz)
Externer Takteingang und -ausgang ermöglichen die einfache Synchronisierung mit mehreren RSPs oder einem externen Referenztakt
Stromversorgung über das USB-Kabel mit einer einfachen Typ-B-Buchse
11 hochselektive, eingebaute Front-End-Vorwahlfilter an den beiden SMA-Antennenanschlüssen
Per Software wählbarer mehrstufiger rauscharmer Vorverstärker
Bias-T-Netzteil zur Versorgung des an der Antenne montierten LNA
In einem robusten, schwarz lackierten Stahlgehäuse untergebracht
SDRuno – SDR-Software der Extraklasse (für Windows)
Dokumentierte API für die Entwicklung neuer Anwendungen
Technische Daten
Frequenzbereich
1 kHz – 2 GHz
Antennenanschluss
SMA
Antennenimpedanz
50 Ohm
Stromverbrauch (typisch)
Single-Tuner Mode: 180 mA (ohne Bias-T)Dual-Tuner Mode: 280 mA (ohne Bias-T)
USB-Anschluss
USB-B
Maximale Eingangsleistung
+0 dBm kontinuierlich+10 dBm kurzzeitig
ADC Abtastraten
2-10,66 MSPS
ADC Anzahl der Bits
14 bit 2-6,048 MSPS12 bit 6,048-8,064 MSPS10 bit 8,064-9,216 MSPS8 bit >9,216 MSPS
Bias-T
4,7 V100 mA garantiert
Referenz
0,5ppm 24 MHz TCXO.Frequenzfehler auf 0,01ppm im Feld trimmbar.
Betriebstemperatur
−10˚C bis +60˚C
Abmessungen
98 x 94 x 33 mm
Gewicht
315 g
Downloads
Datasheet
Detailed Technical Information
Software
RSPdx-R2 vs RSPduo
RSPdx-R2
RSPduo
Kontinuierlicher Bereich von 1 kHz bis 2 GHz
✓
✓
Bis zu 10 MHz sichtbare Bandbreite
✓
✓
14-Bit-ADC-Siliziumtechnologie plus mehrere Hochleistungs-Eingangsfilter
✓
✓
Per Software wählbare AM/FM- und DAB-Rundfunkband-Sperrfilter
✓
✓
4,7 V Bias-T für die Versorgung eines externen Antennenverstärkers
✓
✓
Stromversorgung über das USB-Kabel mit einer einfachen Typ-B-Buchse
✓
✓
50Ω SMA-Antenneneingang(e) für 1 kHz bis 2 GHz Betrieb (per Software wählbar)
2
2
Zusätzlicher per Software wählbarer Hi-Z-Eingang für bis zu 30 Mhz-Betrieb
✓
Zusätzlicher per Software wählbarer 50-Ω-BNC-Eingang für den Betrieb mit bis zu 200 MHz
✓
Zusätzlicher LF/VLF-Filter für unter 500 kHz
✓
24 MHz Referenztakt-Eingang (+ Ausgang auf RSPduo)
✓
✓
Duale Tuner ermöglichen den Empfang auf 2 völlig unabhängigen 2-MHz-Bereichen
✓
Zwei Tuner ermöglichen Diversity-Empfang mit SDRuno
✓
Robustes schwarz lackiertes Stahlgehäuse
✓
✓
Gesamtleistung unter 2 MHz für MW und LF
++
+
Mehrere gleichzeitige Anwendungen
+
++
Leistung unter schwierigen Fading-Bedingungen (*mit Diversity-Abstimmung)
+
*++