Produkte
-
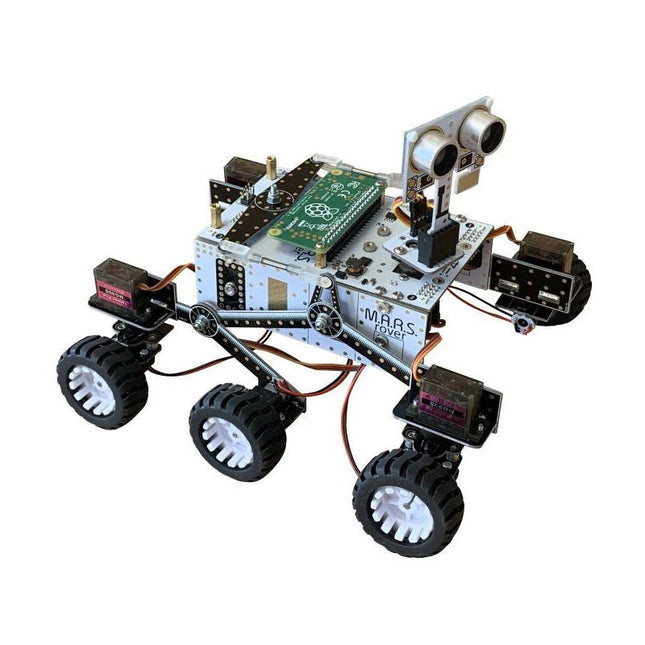
4tronix 4tronix M.A.R.S. Rover Roboter-Kit für Raspberry Pi Zero
Inspiriert durch die NASA Mars Rover "Curiosity" und "Perseverance" ist dieser innovative M.A.R.S. Rover ein autonomes Fahrzeug, das entwickelt wurde, um auf unwegsamem Gelände auf der Erde eingesetzt zu werden. Er verwendet denselben Kipphebel-, Drehgestell- und Differentialarmmechanismus. M.A.R.S. ist ein Akronym für "Mobile Autonomous Robotic System". Features 6 Motoren: 80 U/min 6 V, N20 Mikro-Getriebemotoren 4 Servos: MG90S Metallgetriebe-Analog-Mikro-Servos 4 Fire LEDs Ultraschall-Abstandssensor am lenkbaren Mast Gesamtzahl der Spezial-PCBs: 30 Anzahl der verschiedenen PCB-Designs: 11 Länge: 200 mm Breite: 185 mm Höhe mit Mast: 170 mm Gewicht ohne Raspberry Pi Zero und Batterien: 460 g Es steht eine Python-Bibliothek für den Raspberry Pi Zero zur Verfügung, mit der sich das Gerät leicht steuern lässt. Erforderlich Raspberry Pi Zero 4 wiederaufladbare AA-Batterien Downloads Assembly of 4tronix M.A.R.S. Rover Kit Programming M.A.R.S. Rover on Raspberry Pi Zero Coding using Microsoft Makecode on GitHub
-
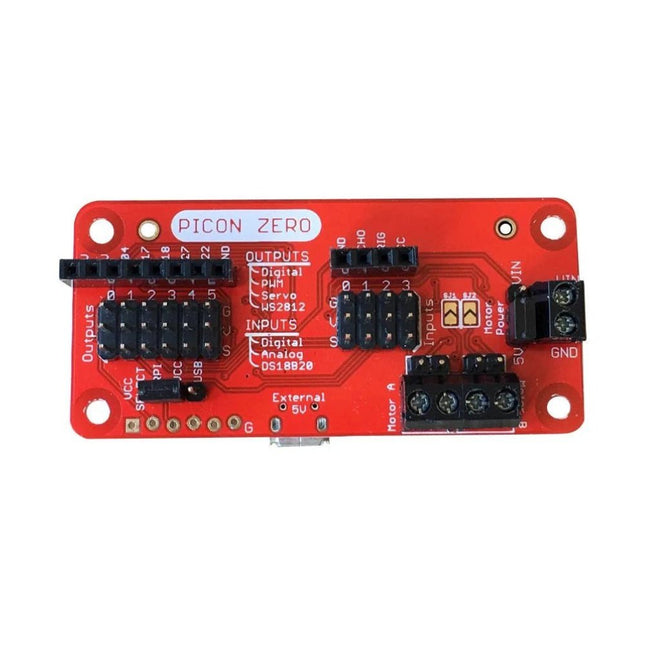
4tronix 4tronix Picon Zero v1.3 - Intelligent Robotics Controller for Raspberry Pi
Der Picon Zero ist ein Add-on für den Raspberry Pi. Es hat die gleiche Größe wie ein Raspberry Pi Zero und eignet sich daher ideal als pHat. Über einen 40-Pin-GPIO-Anschluss ist die Nutzung natürlich auch auf jedem anderen Raspberry Pi möglich. Neben zwei vollständigen H-Bridge-Motortreibern verfügt der Picon Zero über mehrere Eingangs-/Ausgangspins, die Ihnen mehrere Konfigurationsoptionen bieten. Dadurch können Sie ganz einfach Ausgänge oder analoge Eingänge zu Ihrem Raspberry Pi hinzufügen, ohne komplizierte Software oder Kernel-spezifische Treiber. Gleichzeitig erschließt es 5 GPIO-Pins vom Raspberry Pi und stellt die Schnittstelle für einen Ultraschall-Abstandssensor HC-SR04 bereit. Beim Picon Zero sind alle Komponenten, einschließlich der Stiftleisten und Schraubklemmen, vollständig verlötet. Löten ist nicht erforderlich. Sie können es direkt nach dem Auspacken verwenden. Merkmale Leiterplatte im pHat-Format: 65 mm x 30 mm Zwei vollständige H-Bridge-Motortreiber. Fahren Sie kontinuierlich bis zu 1,5 A pro Kanal bei 3 V - 11 V. Jeder Motorausgang verfügt sowohl über eine 2-polige Stiftleiste als auch über eine 2-polige Schraubklemme. Die Motoren können über die 5 V des Picon Zero oder eine externe Stromquelle (3 V – 11 V) betrieben werden. Die 5 V des Picon Zero können aus der 5 V-Leitung des Raspberry Pi oder einem USB-Anschluss am Picon Zero ausgewählt werden. Das bedeutet, dass Sie praktisch über zwei USB-Batteriebänke verfügen können: eine für die Stromversorgung der Servos und Motoren des Picon Zero und die andere für die Stromversorgung des Pi. 4 Eingänge, die bis zu 5 V akzeptieren können. Diese Eingänge können wie folgt konfiguriert werden: Digitale Eingänge Analoge Eingänge DS18B20 DHT11 6 Ausgänge, die 5 V ansteuern können und wie folgt konfiguriert werden können: Digitaler Ausgang PWM-Ausgang Servo NeoPixel WS2812 Alle Ein- und Ausgänge verwenden 3-polige GVS-Stiftleisten. 4-polige Buchsenleiste zum direkten Anschluss an einen Ultraschall-Abstandssensor HC-SR04. 8-Pin-Buchsenleiste für Masse-, 3,3-V-, 5-V- und 5-GPIO-Signale, sodass Sie deren zusätzliche Funktionen hinzufügen können. Hardwarekonfiguration Picon Zero verfügt über zwei Jumper zum Einstellen der Hardwarekonfiguration. Stellen Sie sicher, dass Sie sie an der richtigen Position platziert haben. JP1 – 5-V-Wahlschalter der Platine. Dieser Jumper wählt aus, woher die 5-V-Stromversorgung für die Picon Zero-Ausgänge stammt. Die Optionen sind: Jumper oben zwischen RPI und 5 V. Die 5 V-Stromversorgung für die Platine erfolgt über die Pins des Raspberry Pi am GPIO-Anschluss. Aufgrund der geringen Ausgangsleistung der Geräte und der 5-V-Motoren können alle Geräte mit einem einzigen 5-V-Stromeingang betrieben werden. Jumper an der Unterseite zwischen USB und 5 V. Die 5 V-Stromversorgung erfolgt über den microUSB-Anschluss des Picon Zero. Nützlich für Geräte mit höherer Ausgangsleistung, da Sie über den Micro-USB-Anschluss auf der Platine zusätzlichen Strom bereitstellen können JP2 – Motorleistungswähler. Dieser Jumper wählt aus, wo die Motoren mit Strom versorgt werden. Die beiden Optionen hier sind die folgenden: Jumper oben zwischen MotorPower und Vin. Der Antrieb der Motoren erfolgt über die 2-polige Schraubklemme. Die Spannung kann zwischen 3 V und 11 V liegen. Nützlich für Motoren, die eine andere Spannung als 5 V benötigen oder die mehr Strom benötigen, als an einem der USB-Eingangsanschlüsse verfügbar ist Jumper unten zwischen 5 V und MotorPower. Die Motoren werden über die 5 V der Platine betrieben. Raspberry Pi-Konfiguration Der Picon Zero ist ein I²C-Gerät. Stellen Sie sicher, dass Ihr Raspberry Pi richtig für die Verwendung von I²C und SMBus eingerichtet ist: sudo apt-get install python-smbus python3-smbus python-dev python3-dev sudo nano /boot/config.txt Fügen Sie am Ende der Datei die folgenden Zeilen hinzu dtparam=i2c1=on dtparam=i2c_arm=on Drücken Sie Strg-X und verwenden Sie zum Speichern die Standardeingabeaufforderungen Sudo-Neustart Stecken Sie den Picon Zero auf den Pi und führen Sie i2cdetect -y 1 aus Wenn alles gut geht, wird der Picon Zero wie unten gezeigt als Adresse 22 angezeigt:
€ 18,95€ 8,50
Mitglieder identisch

