Vorübergehende Verzögerung bei der Lieferung von Unitree-Robotern
Wie viele andere Lieferanten erleben auch wir derzeit Verzögerungen bei der Lieferung von Unitree-Robotern. Eine Sendung unseres Lieferanten steckt derzeit im Zoll fest, was leider zu späteren Lieferungen bereits aufgegebener Bestellungen führt.
Wir arbeiten aktiv mit unserem Lieferanten daran, dieses Problem zu lösen, und erwarten in Kürze mehr Klarheit. Leider können wir derzeit jedoch keine festen Zusagen machen. Eine neue Lieferung ist bereits auf dem Weg, wird aber noch etwas Zeit in Anspruch nehmen. Da auch andere Lieferanten mit denselben Herausforderungen konfrontiert sind, ist ein Wechsel zu einem anderen Anbieter derzeit keine schnellere Lösung. Unsere oberste Priorität ist die Lieferung der bestehenden Bestellungen.
Falls Sie Fragen haben oder Ihre Bestellung aktualisieren möchten, zögern Sie bitte nicht, unseren Kundenservice zu kontaktieren. Wir halten Sie über weitere Entwicklungen auf dem Laufenden.
Die Unitree Go2-Serie besteht aus vierbeinigen Robotern für die Forschung und Entwicklung. Entwicklung autonomer Systeme in den Bereichen Mensch-Roboter-Interaktion (HRI), SLAM & Transport. Aufgrund der vier Beine und des 12DOF kann dieser Roboter eine Vielzahl unterschiedlicher Gelände bewältigen. Der Go2 verfügt über einen perfektionierten Antrieb & Power-Management-System, das eine Geschwindigkeit (je nach Ausführung) von bis zu 3,7 m/s oder 11,88 km/h bei einer Betriebszeit von bis zu 4 Stunden ermöglicht. Darüber hinaus verfügen die Motoren über ein Drehmoment von 45 N.m am Körper/Oberschenkel und an den Knien, was auch Sprünge oder Backflips ermöglicht.
Features
Super-Erkennungssystem: 4D LIDAR L1
Maximale Laufgeschwindigkeit: ca. 5 m/s
Spitzengelenkdrehmoment: ca. 45 Nm
Wireless-Modul: WiFi 6/Bluetooth/4G
Extrem lange Akkulaufzeit: ca. 2-4 Stunden
Intelligentes Side-Follow-System: ISS 2.0
Technische Daten
Tracking-Modul: Ferngesteuertes oder automatisches Tracking
Frontkamera: Bildübertragungsauflösung 1280 x 720, Sichtfeld 120°, Ultraweitwinkelobjektiv sorgt für satte Klarheit
Frontlampe: Erhellt den Weg vor Ihnen hell
4D LiDAR L1: 360°x90° omnidirektionales Ultraweitwinkel-Scannen ermöglicht automatisches Ausweichen mit kleinem toten Winkel und stabilen Betrieb
12 Kniegelenkmotoren: Stark und kraftvoll, schön und einfach, Brandy neues visuelles Erlebnis
Intercom-Mikrofon: Effektive Kommunikation ohne Szenario-Einschränkungen
Selbstaufrollender Gurt: Einfaches Tragen und Laden von Gegenständen
Stabiler, leistungsfähiger mit fortschrittlichen Geräten: 3D LiDAR, 4G-ESIM-Karte, WiFi 6 mit Dualband, Bluetooth 5.2 für stabile Verbindung und Fernsteuerung
Leistungsstarker Rechenkern: Motion Controller, Hochleistungs-ARM-Prozessor, verbesserter Al-Algorithmus-Prozessor, externes ORIN NX/NANO
Intelligenter Akku: Standard 8000-mAh-Akku, langlebiger 15000-mAh-Akku, Schutz vor Übertemperatur, Überladung und Kurzschluss.
Lautsprecher für die Musikwiedergabe: Hören Sie Musik nach Lust und Laune
Unitree Go2-Varianten
Der Go2 überzeugt nicht nur durch seine technischen Fähigkeiten, sondern auch durch ein modernes und schlankes Design, das ihm einen futuristischen Look verleiht und ihn zu einem echten Hingucker macht. Der Go2 Air ist speziell für Demos und Präsentationen konzipiert. Mit seinen Grundmerkmalen bietet es eine solide Grundlage, um die Bewegungsfähigkeiten und Funktionalität eines vierbeinigen Roboters zu demonstrieren. Wichtig: Der Go2 Air wird ohne Controller geliefert. Dies kann optional erworben werden.
Mit einer leistungsstarken 8-Core-Hochleistungs-CPU bieten Pro und Edu beeindruckende Rechenleistung, die für komplexe Aufgaben und anspruchsvolle Berechnungen erforderlich ist. Dies ermöglicht eine schnellere und effizientere Datenverarbeitung und macht den Pro und Edu zu einem zuverlässigen Partner für Ihre Projekte.
Ab der Edu-Version ist der Go2 programmierbar und eröffnet endlose Möglichkeiten für die Entwicklung und Erforschung eigener Robotikanwendungen. Der Go2 ist außerdem in der Lage, eine Stufenhöhe von bis zu 14 cm zu bewältigen. Dies macht es zu einem idealen Werkzeug für Forschung, Ausbildung und den Einstieg in die Welt der Robotik.
Der Go2 Edu wird mit einer Fernbedienung geliefert, die Ihnen eine einfache und intuitive Steuerung ermöglicht. Außerdem erhalten Sie eine Dockingstation mit beeindruckender Rechenleistung von 100 TOPS, die mit leistungsstarken KI-Algorithmen ausgestattet ist und Ihnen technischen Support bietet.
Go2 Edu ist mit einem leistungsstarken 15000 mAh-Akku ausgestattet, der ihm eine beeindruckende Laufzeit von bis zu 4 Stunden ermöglicht. Diese lange Betriebszeit ermöglicht es dem Roboter, längere Erkundungsmissionen durchzuführen und anspruchsvolle Aufgaben zu erledigen.
Go2 Edu Plus 3D LiDAR wird mit einem leistungsstarken Hesai XT16 3D LiDAR ausgeliefert. Dieser LiDAR-Sensor ermöglicht dem Roboter eine präzise dreidimensionale Wahrnehmung seiner Umgebung und ermöglicht so eine reibungslose Navigation und intelligente Hindernisvermeidung.
Modellvergleich
Air
Pro
Edu/Edu Plus
Abmessungen (stehend)
70 x 31 x 40 cm
70 x 31 x 40 cm
70 x 31 x 40 cm
Abmessungen (hockend)
76 x 31 x 20 cm
76 x 31 x 20 cm
76 x 31 x 20 cm
Material
Aluminiumlegierung + hochfester Kunststoff
Aluminiumlegierung + hochfester Kunststoff
Aluminiumlegierung + hochfester Kunststoff
Gewicht (mit Akku)
ca. 15 kg
ca. 15 kg
ca. 15 kg
Spannung
28~33,6 V
28~33,6 V
28~33,6 V
Spitzenleistung
ca. 3000 W
ca. 3000 W
ca. 3000 W
Nutzlast
≈7 kg (MAX ~ 10 kg)
≈8 kg (MAX ~ 10 kg)
≈8 kg (MAX ~ 12 kg)
Geschwindigkeit
0~2.5 m/s
0~3.5 m/s
0~3.7 m/s (MAX ~ 5 m/s)
Max. Steigfallhöhe
ca. 15 cm
ca. 16 cm
ca. 16 cm
Max. Steigwinkel
30°
40°
40°
Basisrechenleistung
N/A
8-Kern-Hochleistungs-CPU
8-Kern-Hochleistungs-CPU
Aluminium-Kniegelenkmotor
12 Satz
12 Satz
12 Satz
Gelenkinterne Schaltung (Knie)
✓
✓
✓
Joint Heat Pipe Kühler
✓
✓
✓
Bewegungsbereich
Körper: −48~48°
Körper: −48~48°
Körper: −48~48°
Oberschenkel: −200°~90°
Oberschenkel: −200°~90°
Oberschenkel: −200°~90°
Schaft: −156°~−48°
Schaft: −156°~−48°
Schaft: −156°~−48°
Max. Drehmoment
N/A
ca. 45 N.m
ca. 45 N.m
Super-Weitwinkel 3D-LiDAR
✓
✓
✓
Wireless Vektorpositionierungs-Tracking-Modul
N/A
✓
✓
HD-Weitwinkelkamera
✓
✓
✓
Fußende-Kraftsensor
N/A
N/A
✓
Grundlegende Aktion
✓
✓
✓
Auto-Skalierband
N/A
✓
N/A
Aktualisiertes intelligentes OTA
✓
✓
✓
RTT 2.0 Bildübertragung
✓
✓
✓
App Basic Fernsteuerung
✓
✓
✓
App-Daten anzeigen
✓
✓
✓
App Grafisches Programm
✓
✓
✓
Frontlampe (3 W)
✓
✓
✓
WiFi 6 mit Dualband
✓
✓
✓
Bluetooth 5.2/4.2/2.1
✓
✓
✓
4G-Modul
N/A
CN/GB
CN/GB
Sprachunktion
N/A
✓
✓
Musikwiedergabe
N/A
✓
✓
ISS 2.0 Intelligentes Side-Follow-System
N/A
✓
✓
Intelligente Erkennung und Vermeidung
✓
✓
✓
Sekundäre Entwicklung
N/A
N/A
✓
Manuelle Steuerung
Optional
Optional
✓
Modul mit hoher Rechenleistung
N/A
N/A
Edu: 40 TOPS Rechenleistung
Edu Plus: 100 TOPS Rechenleistung
NVIDIA Jetson Orin (optional)
Intelligente Batterie
Standard (8000 mAh)
Standard (8000 mAh)
Lange Lebensdauer (15000 mAh)
Akkulaufzeit
1-2 Stunden
1-2 Stunden
2-4 Stunden
Ladegerät
Standard (33,6 V, 3,5 A)
Standard (33,6 V, 3,5 A)
Schnellladung (33,6 V, 9 A)
Lieferumgang
1x Unitree Go2 Edu Plus
1x Hesai XT16 3D LiDAR
1x Unitree Go2 Fernbedienung
1x Unitree Go2 Akku (15000 mAh)
1x Unitree Dockingstation mit 100 TOPS Rechenleistung
Downloads
Documentation
iOS/Android apps
GitHub
Dieser mehrachsige Roboter bringt Leistung und Größe perfekt in Einklang.
Features
5 Achsen
Nutzlast: 3 kg
Reichweite: 700 mm
Wiederholgenauigkeit: 0,1 mm
Maximale Geschwindigkeit 1000 mm/s
Anwendungen
Maschinenwartung
Bin Picking
Mobile Plattform
Laborautomatisierung
Roboterforschung
Langlebige kollaborative Roboter für Ihre Automatisierung
Harmonische Antriebe und Servomotoren in Industriequalität garantieren einen ununterbrochenen Betrieb rund um die Uhr.
Hergestellt aus Kohlefaser, 15 kg Gewicht ermöglichen einen einfacheren Einsatz.
Flexible Bereitstellung mit sicherer Funktion
Handprogrammierung, leicht, platzsparend und einfach für mehrere Anwendungen einsetzbar, ohne Ihr Produktionslayout zu ändern. Perfekt für wiederkehrende Aufgaben.
Kollisionserkennung ist für alle unsere Cobots verfügbar. Ihre Sicherheit hat immer oberste Priorität.
Grafische Oberfläche für einsteigerfreundliche Programmierung
Kompatibel mit verschiedenen Betriebssystemen, einschließlich macOS und Windows.
Webbasierte Technologie, kompatibel mit allen gängigen Browsern.
Drag & Drop, um Ihren Code in wenigen Minuten zu erstellen.
Leistungsstarkes und Open-Source-SDK immer zur Hand
Das voll funktionsfähige Open-Source-Python/C++-SDK bietet eine flexiblere Programmierung.
ROS/ROS2-Pakete sind einsatzbereit.
Beispielcodes helfen Ihnen, den Roboterarm reibungslos einzusetzen.
Technische Daten
UFactory 850
xArm 5
xArm 6
xArm 7
Nutzlast
5 kg
3 kg
5 kg
3,5 kg
Reichweite
850 mm
700 mm
700 mm
700 mm
Freiheitsgrade
6
5
6
7
Wiederholbarkeit
±0,02 mm
±0,1 mm
±0,1 mm
±0,1 mm
Maximale Geschwindigkeit
1 m/s
1 m/s
1 m/s
1 m/s
Gewicht (nur Roboterarm)
20 kg
11,2 kg
12,2 kg
13,7 kg
Maximale Geschwindigkeit
180°/s
180°/s
180°/s
180°/s
Joint 1
±360°
±360°
±360°
±360°
Joint 2
-132°~132°
-118°~120°
-118°~120°
-118°~120°
Joint 3
-242°~3.5°
-225°~11°
-225°~11°
±360°
Joint 4
±360°
-97°~180°
±360°
-11°~225°
Joint 5
-124°~124°
±360°
-97°~180°
±360°
Joint 6
±360°
±360°
-97°~180°
Joint 7
±360°
Hardware
Umgebungstemperaturbereich
0-50°C
Stromverbrauch
Min. 8,4 W, typisch 200 W, max. 400 W
Eingangsstromversorgung
24 V DC, 16,5 A
Fußabdruck
Ø 126 mm
Materialien
Aluminium, Kohlefaser
Basis-Connector-Typ
M5x5
Reinraum der ISO-Klasse
5
Robotermontage
Alle
Endeffektor-Kommunikationsprotokoll
Modbus RTU(rs485)
Endeffektor-E/A
2x DI/2x DO/2x AI/1x RS485
Kommunikationsmodus
Ethernet
Lieferumfang
1x xArm 5 Roboterarm
1x AC-Steuerbox
1x Roboterarm-Stromkabel
1x Roboterarm-Endeffektor-Adapterkabel
1x Roboterarm-Signalkabel
1x Steuerbox-Stromkabel
1x Netzwerkkabel
1x Montagewerkzeug
1x Kurzanleitung
Nach dem Einschalten beginnt der YDLIDAR G4 sich zu drehen und die Umgebung um sich herum zu scannen. Die Scandistanz beträgt 16 m und das Gerät bietet eine Scanrate von 9.000 Mal pro Sekunde.
Es macht detaillierte Untersuchungen seiner Umgebung und kann die kleinsten Objekte um sich herum lokalisieren. Mit einem hochpräzisen bürstenlosen Motor und einem Encoder-Disc, der auf Lagern montiert ist, dreht es sich reibungslos und hat eine Betriebsdauer von bis zu 500.000 Stunden.
Der G4 ist eine kostengünstige Lösung für Projekte, die Hinderniserkennung, Hindernisvermeidung und/oder simultane Lokalisierung und Kartierung (SLAM) erfordern. Alle YDLIDAR-Produkte sind ROS-ready.
Features
360 Grad 2D-Reichweiten-Scanning
Stabile Leistung, hohe Präzision
16 m Reichweite
Starke Widerstandsfähigkeit gegenüber Umgebungslichtinterferenzen
Bürstenloser Motorantrieb, stabile Leistung
FDA-Lasersicherheitsstandard Klasse I
360 Grad omnidirektionales Scanning, 5-12 Hz adaptive Scanning-Frequenz
OptoMagnetic-Technologie
Drahtlose Datenkommunikation
Scanrate von 9000 Hz
Dokumentation
ROS-Treiber
Ydlidar-Download-Seite
Unten im Abschnitt "Downloads" finden Sie das Datenblatt sowie die Benutzer- und Entwicklungsanleitungen.
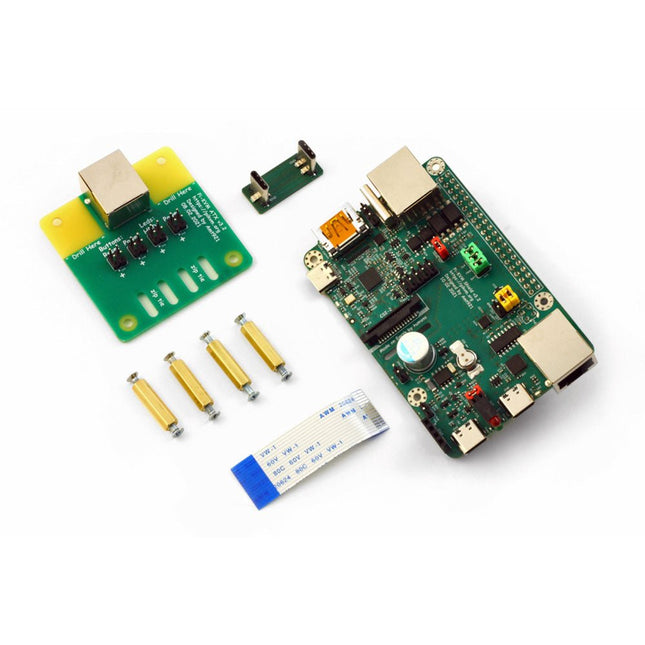
PiKVM V3 ist ein auf Raspberry Pi-basiertes Open Source KVM over IP-Gerät. Es hilft Ihnen bei der Fernverwaltung von Servern oder Workstations, unabhängig vom Status des Betriebssystems oder davon, ob eines installiert ist.
Mit PiKVM V3 können Sie Ihren Computer ein-/ausschalten oder neu starten, das UEFI/BIOS konfigurieren und sogar das Betriebssystem mithilfe der virtuellen CD-ROM oder des Flash-Laufwerks neu installieren. Sie können Ihre Remote-Tastatur und -Maus verwenden oder PiKVM kann eine Tastatur, Maus und einen Monitor simulieren, die dann in einem Webbrowser angezeigt werden, als ob Sie direkt an einem Remote-System arbeiten würden.
Features
HDMI Full HD Aufnahme basierend auf dem TC358743-Chip (extra niedrige Latenz ~100 ms und viele Funktionen wie Kompressionskontrolle)
OTG Tastatur & Maus; Emulation von Massenspeicherlaufwerken
Fähigkeit zur Simulation von "Entfernen und Einstecken" für USB
Integrierte ATX-Stromsteuerung
Integrierte Lüftersteuerung
Echtzeituhr (RTC)
RJ-45 und serieller USB-Konsolenanschluss (zur Verwaltung des PiKVM OS oder zur Verbindung mit dem Server)
Optionales AVR-basiertes HID (für einige seltene und seltsame Motherboards, deren BIOS die OTG-emulierte Tastatur nicht versteht)
Optionaler OLED-Bildschirm zur Anzeige des Netzwerkstatus oder anderer gewünschter Informationen
Fertig aufgebautes Board, kein Löten oder Breadboarding erforderlich.
PiKVM OS – die Software ist vollständig quelloffen
Lieferumfang
PiKVM V3 HAT Karte für Raspberry Pi 4
USB-C Bridge Board, um den HAT mit dem RPi über USB-C zu verbinden
ATX-Controller-Adapterplatine und Verkabelung, um den HAT mit dem Motherboard zu verbinden (wenn Sie die Stromversorgung über die Hardware verwalten möchten)
2 flache CSI-Kabel
Schrauben und Messingabstandshalter
Erforderlich
Raspberry Pi 4
MicroSD-Karte
USB-C nach USB-A Kabel
HDMI-Kabel
Gerades Ethernet-Kabel (für den Anschluss der ATX-Erweiterungskarte)
Netzteil (5,1 V/3 A USB-C, offizielles Raspberry Pi-Netzteil wird empfohlen)
Downloads
User Guide
Images
GitHub
Links
Das PiKVM-Projekt und seine Lehren: Ein Interview mit Maxim Devaev (Entwickler von PiKVM)
Raspberry Pi als KVM-Fernsteuerung
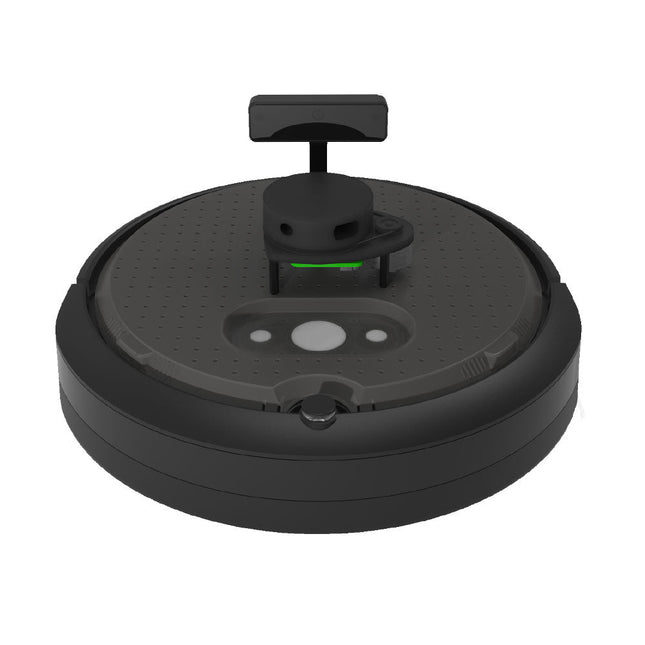
TurtleBot 4 ist die nächste Generation der weltweit beliebtesten Open-Source-Robotikplattform für Bildung und Forschung und bietet bessere Rechenleistung, bessere Sensoren und ein erstklassiges Benutzererlebnis zu einem erschwinglichen Preis.
TurtleBot 4 Lite ist mit einer mobilen iRobot Create 3-Basis, einem leistungsstarken Raspberry Pi 4 mit ROS 2, einer räumlichen KI-Stereokamera OAK-D, 2D LiDAR und mehr ausgestattet. Alle Komponenten wurden nahtlos integriert, um eine sofort einsatzbereite Entwicklungs- und Lernplattform zu bieten.
Technische Daten
Basisplattform
iRobot Create 3
Räder (Durchmesser)
72 mm
Bodenfreiheit
4,5 mm
Bordcomputer
Raspberry Pi 4 (4 GB)
Maximale Lineargeschwindigkeit
0,31 m/s im abgesicherten Modus0,46 m/s ohne abgesicherten Modus
Maximale Winkelgeschwindigkeit
1,90 rad/s
Maximale Nutzlast
9kg
Betriebszeit
2h 30m – 4h je nach Belastung
Ladezeit
2h 30m
Lidar
RPLIDAR A1M8
Kamera
OAK-D-Lite
Benutzerleistung
VBAT @1,9 A5 V @ Schwachstrom3,3 V @ Schwachstrom
USB-Erweiterung
2x USB 2.0 (Typ A)2x USB 3.0 (Typ A)
Programmierbare LEDs
Erstelle 3 Lichtringe
Tasten und Schalter
2x Create 3 User Buttons1x Create 3 Power Button
Batterie
26 Wh Lithium-Ionen (14,4 V nominal)
Ladestation
Inbegriffen
Größe (L x B x H)
342 x 339 x 192 mm
Gewicht
3,3 kg
Downloads
User Manual
Zusätzliche Staffeleibretter für AxiDraw V3/A3 können als Ersatz oder zur Bereitstellung zusätzlicher Werkstücke für den schnellen Wechsel zum nächsten Plot verwendet werden.
Dieses Set besteht aus einer 11,75 x 17 Zoll (29,85 x 43,18 cm) großen Hartfaserplatte mit angebrachten Gummifüßen sowie acht Mikrobinderklammern.
Der Stativadapter ist individuell aus einem massiven Aluminiumblock gefertigt und bietet zwei Standard-Stativbefestigungspunkte mit 3/8-16- bzw. leichtem 1/4-20-Gewinde. Dadurch können Sie den AxiDraw bei Bedarf auf einem Stativ montieren.
Wir empfehlen dringend die Verwendung eines stabilen Stativs mit einem 3/8-16-Anschlusspunkt und einem geeigneten Gegengewicht (Sandsack, Hebegewichte usw.), um das Gewicht des AxiDraw während des Gebrauchs auszugleichen.
Die Installation ist unkompliziert und erfordert keine anderen Werkzeuge als die im Lieferumfang von AxiDraw enthaltenen: Entfernen Sie die vorhandenen Fußpolster vom AxiDraw (entweder Standard- oder Auslegerfüße, je nach Modell) und befestigen Sie diese Platte an den festgehaltenen Muttern in der Unterseite des AxiDraw. Bei AxiDraw SE/A3 (April 2019 und neuer) wird der Stativadapter direkt an den Gewindelöchern in der Basis der Maschine befestigt. Dieser robuste Stativadapter ist mit AxiDraw V3, AxiDraw V3/A3 und AxiDraw V3 XLX kompatibel. Es ist auch mit AxiDraw SE/A3 kompatibel, das im April 2019 und neuer hergestellt wurde.
Spezifikationen
Material: Eloxiertes 6061-T6-Aluminium
Größe: 3,90 x 2,36 x 0,35 Zoll (99,1 x 60 x 8,3 mm)
Gewicht: ca. 144 g
Montagematerial: im Lieferumfang enthalten (vier M4x10-Montageschrauben aus hochfestem Stahl)
MOTORSTEUERUNG MIT H-BRÜCKEN Für DC-, Schritt- und bürstenlose Motoren
DAS TEAM IM ELEKTOR-LABOR Unser Ansatz, unsere bevorzugten Werkzeuge und mehr
RASPBERRY PI ALS KVM-FERNSTEUERUNG Die Software Pi-KVM im Elektor-Labor-Test
Testbericht: IQAUDIO CODEC ZERO Eine Soundkarte für die Raspberry Pi Familie
DAS PIKVM-PROJEKT UND SEINE LEHREN Ein Interview mit Maxim Devaev* (Entwickler von PiKVM)
AUTONOMES FAHRZEUG MIT 2D-LIDAR ESP32 Pico interpretiert die Daten des Lidar-Moduls
RASPBERRY PI ZERO 2 W Ein erfreuliches und notwendiges Update
IMPRESSIONEN VOM WORLD ETHICAL ELECTRONICS FORUM 2021
MOTORSTEUERUNG Wie die Motorsteuerung weniger kompliziert wird
GRÖSSERE ELEKTROMOTORE Prinzipien und Wissenswertes
ESP32-C3: 32-BIT-RISC-EINKERNER Ein erstes Hands-on im Elektor-Labor
SCHÜTZEN SIE SICH SELBST UND ANDERE! Hauptnetzschalter für den Labortisch selbst gebaut
PROGRAMMIEREN IN PYTHON Nickname-Generator mit grafischer Benutzeroberfläche
PRODUCTRONICA FAST FORWARD AWARD 2021: DIE PREISTRÄGER
VIELSEITIGER SERVO-TESTER Servos ohne Datenblatt analysieren
MODBUS ÜBER WLAN Teil 2: Software für das Modbus-TCP-WLAN-Modul
NEURONEN IN NEURONALEN NETZEN VERSTEHEN Teil 3: Praktische Neuronen
IM INNEREN EINES OPEN-SOURCE-PROZESSOREN Ein Beispiel-Kapitel: Lattice- und Xilinx-FPGAs im Vergleich
ALLER ANFANG ... muss nicht schwer sein: Die Spule lässt uns nicht los!
PROJEKT 2.0 Korrekturen, Updates und Leserbriefe
FARBE ZU KLANG Wie man einen Farbsensor über I2C ausliest
BATTLAB EINS Betriebsdauer von batteriebetriebenen Geräten messen und optimieren!
EINFACHER ERDSCHLUSSPRÜFER Isolationstester für Netzspannungsinstallationen
ARMUT UND ELEKTRONIK 1. Ziel für nachhaltige Entwicklung
HEXADOKUS Das Original von Elektorized Sudoku
Diese starre Endeffektorplatte ist als Ersatz für den standardmäßigen AxiDraw-Stiftlift-Z-Tisch konzipiert und bietet ein alternatives Montageschema für die Montage verschiedener Dinge am Ende des AxiDraw-Arms für Anwendungen, bei denen eine größere Steifigkeit, aber die Hebefähigkeit wichtig sind des Standard-Z-Tisches ist nicht erforderlich.
Der starre Endeffektor ist speziell aus Aluminium gefertigt und verfügt über sechs M3-Gewindelöcher und zwei M4-Gewindelöcher für die Montage dessen, was Sie am Ende des AxiDraw montieren möchten, um ihn als 2D-Roboterarm zu verwenden. Das Lochmuster ist mit dem AxiDraw-Stiftclip kompatibel, sodass Sie bei Bedarf den AxiDraw-Stiftclip an diesem Endeffektor montieren können. Die Installation ist unkompliziert, erfordert jedoch einen Pozidrive PZ2-Schraubendreher, der nicht im Lieferumfang enthalten ist*. Entfernen Sie den Stiftclip des AxiDraw und entfernen Sie dann die Z-Stufe für den Stiftlift, indem Sie zwei Schrauben mit dem PZ2-Schraubendreher entfernen. Installieren Sie die starre Endeffektorplatte mit den beiden mitgelieferten Montageschrauben und dem PZ2-Schraubendreher an ihrer Stelle. Möglicherweise möchten Sie auch die Kabelführungen des AxiDraw zurückbinden oder vollständig entfernen, die normalerweise zur Stromversorgung der Stifthubstufe dienen.
Spezifikationen
Material: Eloxiertes 6061-T6-Aluminium
Größe: 1,97 x 1,38 x 0,19 Zoll (50 x 35 x 4,8 mm)
Gewicht: ca. 11g
Montagematerial: im Lieferumfang enthalten (zwei selbstschneidende M4x12-Pozidrive-Schrauben)
Kompatibilität
Alle Stiftplotter der AxiDraw V3-Familie
AxiDraw V3/A3
AxiDraw SE/A3
AxiDraw MiniKit-Modelle
KI in der Praxis
Tauchen Sie ein in die faszinierende Welt der Robotik und Automatisierung!
Dieses Elektor Special zeigt, wie Sie mit Kreativität, etwas Know-how und günstiger Technik eigene Roboter bauen können. Vom ersten DIY-Projekt mit Arduino oder Raspberry Pi bis hin zu intelligenten Systemen mit KI – dieses Heft macht moderne Robotik verständlich und greifbar.
Entdecken Sie praxisnahe Anleitungen, inspirierende Projekte und spannende Einblicke in die Maker-Szene. Lernen Sie, wie aus Experimentierfreude, Gemeinschaft und Offenheit echte Innovation entsteht – und warum Robotik weit mehr ist als nur ein technisches Hobby.
Inhalt
Phantasie wird Realität
Arduino-controlled Drawing Robot
GalaxyRVR Mars Rover Kit for Arduino
YDLIDAR X4Pro Lidar
xHuskyLens AI Camera
DOF Robot Arm mit Raspberry Pi Pico
Fertigungsroboter mit Fischertechnik
Pneumatischer Industrieroboter
Warum bauen wir immer wieder Roboterhunde?
Elektor Mini-Wheelie
Roboterfahrzeuge und autonomes Fahren
KI in der Praxis
Tauchen Sie ein in die faszinierende Welt der Robotik und Automatisierung!
Dieses Elektor Special zeigt, wie Sie mit Kreativität, etwas Know-how und günstiger Technik eigene Roboter bauen können. Vom ersten DIY-Projekt mit Arduino oder Raspberry Pi bis hin zu intelligenten Systemen mit KI – dieses Heft macht moderne Robotik verständlich und greifbar.
Entdecken Sie praxisnahe Anleitungen, inspirierende Projekte und spannende Einblicke in die Maker-Szene. Lernen Sie, wie aus Experimentierfreude, Gemeinschaft und Offenheit echte Innovation entsteht – und warum Robotik weit mehr ist als nur ein technisches Hobby.
Inhalt
Phantasie wird Realität
Arduino-controlled Drawing Robot
GalaxyRVR Mars Rover Kit for Arduino
YDLIDAR X4Pro Lidar
xHuskyLens AI Camera
DOF Robot Arm mit Raspberry Pi Pico
Fertigungsroboter mit Fischertechnik
Pneumatischer Industrieroboter
Warum bauen wir immer wieder Roboterhunde?
Elektor Mini-Wheelie
Roboterfahrzeuge und autonomes Fahren
,
von Burkhard Kainka
RTL-SDR Blog V4 - Besser als V3? (Review)
RTL-SDR-Blogsticks gibt es schon seit einiger Zeit. Hiermit können HF-Signale bis zu 1 GHz oder höher empfangen werden. Der RTL-SDR Blog V4 ist nun schon...